







| mV/grad | valor null (mV) | |
| giroP | 28.9 | 2169.4 |
| giroQ | 28.1 | 2099.1 |
| gyroR | 29.5 | 2588.6 |


Continuamos probando Kalman y tratando de encontrar bugs que hacen que el funcionamiento no sea el esperado.
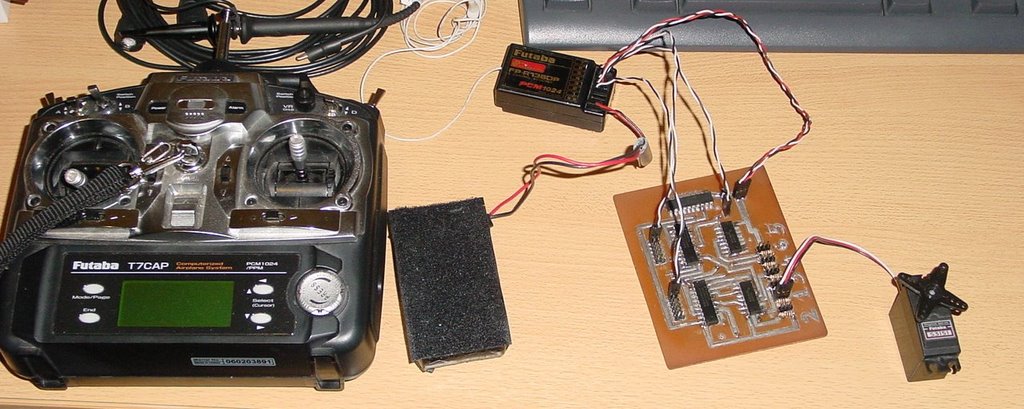
A fin de poder visualizar los datos de los sensores en tiempo real, Rodrigo implementó una ventana (función window de C) que nos permite visualizar en pantalla las coordenadas de la posición, las velocidades angulares, los ángulos de Euler, las aceleraciones y las velocidades lineales. Antes lo que hacíamos era loguear estos datos cada cierto delta_t en un archivo txt y luego mirar el archivo analizando la secuencia de datos registrados.
Luego de contar con esta herramienta pudimos determinar que tenemos un problema no menor con la salida de los gyros. Cuando rotamos noventa grados la IMU (Inercial Measure Unit) según uno de sus ejes (X,Y o Z) éste debería tomar el valor 90 grados y en pantalla el valor mostrado es 20 grados. Lo bueno es que este comportamiento no depende del ángulo de giro. Al parecer es un problema de escala. Hoy vamos a chequear por que sucede esto.
Hay que tener presente que estos ángulos influyen en los valores de las aceleraciones ya que cuando el eje Z no concide con el vector de gravedad la misma debe proyectarse en cada eje. Luego las aceleraciones influyen en el cálculo de la velocidad y en la posición, por tanto es muy importante que los valores de los ángulos estén correctos.
| componente | cantidad |
| PIC 16F690 | 1 |
| BUFFER 74244 | 2 |
| MUX 74157 | 2 |
| PINES 1X6 | 2 |
| PINES 1X3 | 6 |
| PINES 1X2 | 3 |
| SOCALO 20 PINES | 3 |
| SOCALO 16 PINES | 2 |
| CONDENSADOR CERAMICO 0.1 microF | 6 |
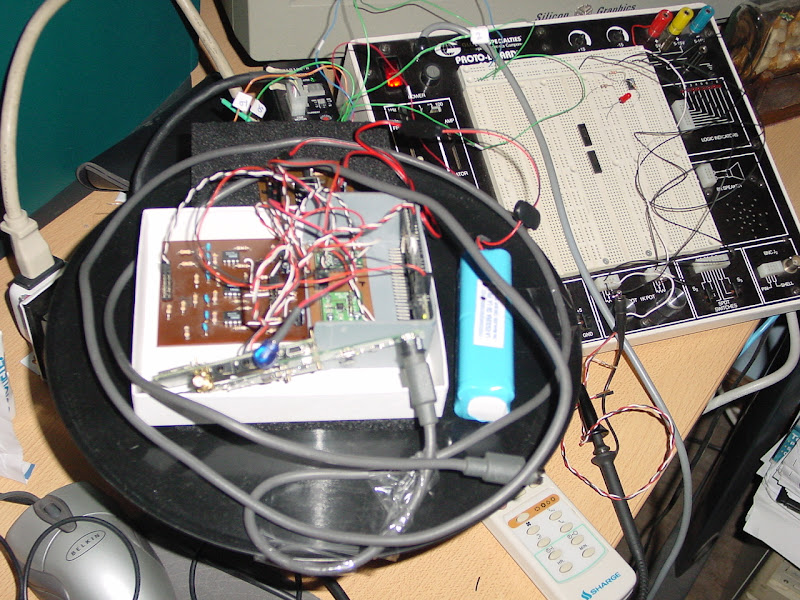
 La idea de Rodrigo para realizar el tuning online valiendose de otro trasmisor con frecuencia distinta a la del Tx de vuelo y uno o unos pics es posible.
La idea de Rodrigo para realizar el tuning online valiendose de otro trasmisor con frecuencia distinta a la del Tx de vuelo y uno o unos pics es posible.El filtro de Kalman es el algoritmo implementado en C encargado de producir las estimaciones que llegan a los controladores PIDs a partir de las señales obtenidas de los sensores.
El filtro de Kalman toma en cuenta la historia del sistema, los errores de medida del proceso y los errores producidos por el ruidoy produce las señales de salida (estimaciones).
Si este filtro funciona correctamente el sistema se comporta de manera esperada, pero si este filtro no funciona bien se pueden obtener soluciones sesgadas completamente erróneas.
La "semilla" para el filtro de Kalman resulta vital para el correcto funcionamiento del mismo.
| Sunshine and patchy clouds | |||
| High | 22°C | ||
| RealFeel®: | 23°C | ||
| Winds: | ENE at 14km/h | ||
| Wind Gusts: | 40 km/h | ||
| Max UV Index: | Very High (8) | ||
| Amount of Precipitation: | 0.0mm | ||
| Amount of Rain: | 0.0mm | ||
| Amount of Snow: | 0.00cm | ||
| Hours of Precipitation: | 0 Hrs | ||
| Hours of Rain: | 0 Hrs | ||
| Hours of Daylight: | 13.5 Hrs |



 La CTA dispone de dos pistas una de pasto, que es la más comunmente usada por los aviones de aeromodelismo, y otra de asfalto que es la que se aprecia en la foto. Esta pista tiene una longitud de 120 m y un ancho de unos 14 metros.
La CTA dispone de dos pistas una de pasto, que es la más comunmente usada por los aviones de aeromodelismo, y otra de asfalto que es la que se aprecia en la foto. Esta pista tiene una longitud de 120 m y un ancho de unos 14 metros.
 Momento en que se están acoplando las alas al fuselaje y conectando los distintos servos al receptor alojado en el interior del fuselaje.
Momento en que se están acoplando las alas al fuselaje y conectando los distintos servos al receptor alojado en el interior del fuselaje.
 En estas dos fotos se aprecia el avión y las dimensiones del mismo.
En estas dos fotos se aprecia el avión y las dimensiones del mismo. Foto del avión realizando pruebas de funcionamiento dinámico en pista.
Foto del avión realizando pruebas de funcionamiento dinámico en pista. pegue o durante el vuelo.
pegue o durante el vuelo. El avión aparece sin el carenado que cubre el motor porque se estaban realizando ajustes en la carburación y en la posición del servo que comanda la rueda del tren delantero.
El avión aparece sin el carenado que cubre el motor porque se estaban realizando ajustes en la carburación y en la posición del servo que comanda la rueda del tren delantero.
 Bajo el fuerte sol, en la pista de la EMA, puede verse el nerviosismo previo al despegue en el rostro del equipo. Momentos antes tuvimos problemas con el control del acelerador, en dos oportunidades quedó trabado y no detectabamos la falla. Se corrigió el funcionamiento dinámico de la rueda del tren delantero junto con el timón de deriva (cola).
Bajo el fuerte sol, en la pista de la EMA, puede verse el nerviosismo previo al despegue en el rostro del equipo. Momentos antes tuvimos problemas con el control del acelerador, en dos oportunidades quedó trabado y no detectabamos la falla. Se corrigió el funcionamiento dinámico de la rueda del tren delantero junto con el timón de deriva (cola).
En sus diferentes presentaciones, todas consumen menos de 250mA cuando están a máxima capacidad y menos de 50mA cuando están inactivas.
Gumstix ejecuta el sistema operativo Linux (embebido).
 ue disponemos.
ue disponemos. Con el proposito de tener ideas de dimensiones del avion, usamos un poco de carton y foam de embalaje para tener una idea de hacia donde ibamos con la construccion de las partes. Esto nos sirvio para rapidamente darnos cuenta de si las proporciones previamente discutidas se iban cumpliendo.
Con el proposito de tener ideas de dimensiones del avion, usamos un poco de carton y foam de embalaje para tener una idea de hacia donde ibamos con la construccion de las partes. Esto nos sirvio para rapidamente darnos cuenta de si las proporciones previamente discutidas se iban cumpliendo. A modo de seguir visualizando y fijar ideas sobre dimensiones finales, tomamos esta fotografia con Andres. Al fondo se ve el otro Andres (chappe) y la Keyna que fue un integrante mas durante esa etapa en casa :-)
A modo de seguir visualizando y fijar ideas sobre dimensiones finales, tomamos esta fotografia con Andres. Al fondo se ve el otro Andres (chappe) y la Keyna que fue un integrante mas durante esa etapa en casa :-)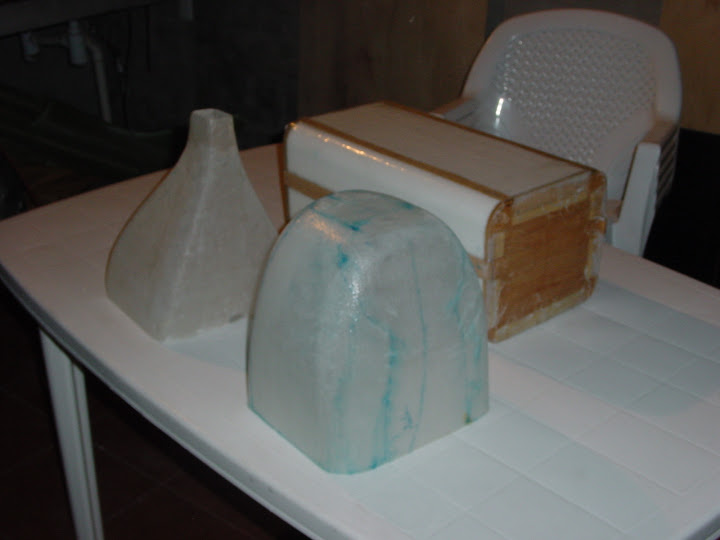 En esta foto se ve las piezas principales del fuselaje: nariz, cuerpo principal y terminacion de la cola (por ahora no usada por su peso)
En esta foto se ve las piezas principales del fuselaje: nariz, cuerpo principal y terminacion de la cola (por ahora no usada por su peso)

 Lunes 6-nov-2006
Lunes 6-nov-2006
 Servo que mueve la rueda del tren de aterrizaje delantero. Este servo se mueve en forma coordinada con el servo de la cola, pero no ocupan el mismo canal. Inicialmente compartían el mismo canal, el comportamiento estático era bueno, pero el dinámico muy malo, por tanto se modifico. Los cilindros blancos que se aprecian son los soportes del motor.
Servo que mueve la rueda del tren de aterrizaje delantero. Este servo se mueve en forma coordinada con el servo de la cola, pero no ocupan el mismo canal. Inicialmente compartían el mismo canal, el comportamiento estático era bueno, pero el dinámico muy malo, por tanto se modifico. Los cilindros blancos que se aprecian son los soportes del motor. Vista interior del fuselaje. Compartimento trasero destinado al receptor y al controlador, incluyendo sensores y baterías de alimentación. Los cables que aparecen en la imagen corresponden a los conectores de los servos de los alerones, el elevador y el rudder. También se puede apreciar en la parte superior izquierda la llave de corte de las baterías que alimentan los servos y el receptor. Tambien se aprecia uno de los tensores de aluminio que dan mayor rigidez al tren de aterrizaje trasero.
Vista interior del fuselaje. Compartimento trasero destinado al receptor y al controlador, incluyendo sensores y baterías de alimentación. Los cables que aparecen en la imagen corresponden a los conectores de los servos de los alerones, el elevador y el rudder. También se puede apreciar en la parte superior izquierda la llave de corte de las baterías que alimentan los servos y el receptor. Tambien se aprecia uno de los tensores de aluminio que dan mayor rigidez al tren de aterrizaje trasero. En esta foto se aprecia el servo que comanda el acelerador del carburador. El avión cuenta con un motor 38 cc de dos tiempos, que funciona con una mezcla de nafta y aceite con una relación de 20 a 1.
En esta foto se aprecia el servo que comanda el acelerador del carburador. El avión cuenta con un motor 38 cc de dos tiempos, que funciona con una mezcla de nafta y aceite con una relación de 20 a 1. Vista inferior. Se ve como el carenado permite el fácil acceso a la bujía del motor. Inicialmente el carenado era de una sola pieza y totalmente cerrado, por tanto para retirarlo había que sacar la hélice, lo cual era muy trabajoso. Hay que tener presente que cada vez que el avión va a pista es necesario realizar un ajuste en la carburación, pues es muy sensible a los cambios de temperatura y demás condiciones del climáticas. Luego se modificó, haciendo que la pieza fuese en dos partes, pero resultaba compleja su colocación, además encontramos que los tornillos que unian las piezas se aflojaban con la vibración del motor. En la foto se observa la última versión. El carenado se sujeta al fuselaje con 5 tornillos, las tuercas están fijas en el interior para hacer más sencillo el montaje. El carenado se coloca desde la parte superior, no teniendo que tocar ninguna pieza del motor.
Vista inferior. Se ve como el carenado permite el fácil acceso a la bujía del motor. Inicialmente el carenado era de una sola pieza y totalmente cerrado, por tanto para retirarlo había que sacar la hélice, lo cual era muy trabajoso. Hay que tener presente que cada vez que el avión va a pista es necesario realizar un ajuste en la carburación, pues es muy sensible a los cambios de temperatura y demás condiciones del climáticas. Luego se modificó, haciendo que la pieza fuese en dos partes, pero resultaba compleja su colocación, además encontramos que los tornillos que unian las piezas se aflojaban con la vibración del motor. En la foto se observa la última versión. El carenado se sujeta al fuselaje con 5 tornillos, las tuercas están fijas en el interior para hacer más sencillo el montaje. El carenado se coloca desde la parte superior, no teniendo que tocar ninguna pieza del motor. Tren de aterrizaje delantero. Fue modificado de su verión de fábica, porque era muy largo y se doblaba demasiado con los desniveles de la pista, principalmente en pista de pasto , y hacía que el avión bajara la nariz y la hélice impactaba contra el piso, con la consecuente rotura. Ahora estamos muy conformes con su funcionamiento, el avión es muy estable con este nuevo formato más corto en su parte flexible.
Tren de aterrizaje delantero. Fue modificado de su verión de fábica, porque era muy largo y se doblaba demasiado con los desniveles de la pista, principalmente en pista de pasto , y hacía que el avión bajara la nariz y la hélice impactaba contra el piso, con la consecuente rotura. Ahora estamos muy conformes con su funcionamiento, el avión es muy estable con este nuevo formato más corto en su parte flexible. Compuertas de acceso al interior del fuselaje. La puerta delantera da acceso al tanque de combustibe de 500 cc y la trasera al control y demás hardware montado en el avión.
Compuertas de acceso al interior del fuselaje. La puerta delantera da acceso al tanque de combustibe de 500 cc y la trasera al control y demás hardware montado en el avión. Perfil del ala y alerón. El perfil de ala fue una de las cosas más discutidas en las primeras etapas del proyecto cuando estabamos diseñando el avión. Terminamos adoptando un perfil Epler 214 que es autoestable, que se ajustaba a nuestros requerimientos. Los alerones son accionados por servos de alto torque montados uno en cada ala a unso pocos centímetros de la bisagra del alerón.
Perfil del ala y alerón. El perfil de ala fue una de las cosas más discutidas en las primeras etapas del proyecto cuando estabamos diseñando el avión. Terminamos adoptando un perfil Epler 214 que es autoestable, que se ajustaba a nuestros requerimientos. Los alerones son accionados por servos de alto torque montados uno en cada ala a unso pocos centímetros de la bisagra del alerón. En esta foto se aprecia levemente el diedro que presentas las alas, lo cual torna al avión de gran estabilidad lateral. En todo momento lo que se buscó fue construir un modelo estable tanto longitudinalmente, como lateralmente, que permitiera al avión realizar maniobras seguras y facilitando luego la tarea del controlador. Hay que tener presente que este modelo está pensado para aplicaciones como ser reconocimiento y fotografía aerea, las cuales requieren un vuelo estable-
En esta foto se aprecia levemente el diedro que presentas las alas, lo cual torna al avión de gran estabilidad lateral. En todo momento lo que se buscó fue construir un modelo estable tanto longitudinalmente, como lateralmente, que permitiera al avión realizar maniobras seguras y facilitando luego la tarea del controlador. Hay que tener presente que este modelo está pensado para aplicaciones como ser reconocimiento y fotografía aerea, las cuales requieren un vuelo estable-
 Sabado 4-nov-2006
Sabado 4-nov-2006 Decidimos ir a la pista de la CTA a recibir nuestra primer clase de vuelo. Para ello utilizamos un aeromodelo conocido como Sky Leader, que se puso en orden de vuelo con el fin de recibir nuestra instrucción. Este modelo es una avión con un motor 0.46 plg^3, de ala baja, con grandes prestaciones que lo tornan un avión de gran maniobrabilidad en vuelo. En principio este avión no resulta adecuado para un principiante dado que no es una avión tipo Trainer y por tanto no es muy estable.
Decidimos ir a la pista de la CTA a recibir nuestra primer clase de vuelo. Para ello utilizamos un aeromodelo conocido como Sky Leader, que se puso en orden de vuelo con el fin de recibir nuestra instrucción. Este modelo es una avión con un motor 0.46 plg^3, de ala baja, con grandes prestaciones que lo tornan un avión de gran maniobrabilidad en vuelo. En principio este avión no resulta adecuado para un principiante dado que no es una avión tipo Trainer y por tanto no es muy estable.
 equipo fue adquiriendo mejor manejo y gracias a que un socio de la CTA nos prestó su radio y un cable trainer, que permite interconectar 2 trasmisores, uno como "master" para el instructor y otro como "esclavo" para el aprendiz. Esto permite recibir las instrucciones de vuelo de manera segura no poniendo en peligro la integridad del modelo. De esta forma recibimos nuestra primer clase de vuelo realizando maniobras básicas.
equipo fue adquiriendo mejor manejo y gracias a que un socio de la CTA nos prestó su radio y un cable trainer, que permite interconectar 2 trasmisores, uno como "master" para el instructor y otro como "esclavo" para el aprendiz. Esto permite recibir las instrucciones de vuelo de manera segura no poniendo en peligro la integridad del modelo. De esta forma recibimos nuestra primer clase de vuelo realizando maniobras básicas. a seguir.
a seguir.
{kind=link}