Ayer finalmente compiló el programa assembler y se pudo grabar en el pic.
Hoy en lo Rodrigo voy a probar si funciona correctamente.
jueves, diciembre 21, 2006
martes, diciembre 12, 2006
PID's
Bueno finalmente queda terminado el bloque de PIDs, el sistema de control consiste de 4 bloques internis PID y 2 externos.
Los bloques internos controlan directamente la salida a los actuadores (Aleron, timon, elevador y acelerador), mientras que los externos se encargan de mantener la altura del avion y de elegir una direccion de vuelo.
Ademas de los bloques PID se tubo que construir en C un modelo de avion lo mas real posible para poder comprobar el correcto funcionamiento del sistema de control.
El desafio para los siguientes dias en lograr modelar nuestro avion para encontrar los parametros de cada bloque PID que optimicen el funcionamiento del aeroplano en cuanto a tiempo de levantamiento y error en estado estable.
Ma;ana Miercoles nos reuniremos con el grupo para definir como proseguimos.
Los bloques internos controlan directamente la salida a los actuadores (Aleron, timon, elevador y acelerador), mientras que los externos se encargan de mantener la altura del avion y de elegir una direccion de vuelo.
Ademas de los bloques PID se tubo que construir en C un modelo de avion lo mas real posible para poder comprobar el correcto funcionamiento del sistema de control.
El desafio para los siguientes dias en lograr modelar nuestro avion para encontrar los parametros de cada bloque PID que optimicen el funcionamiento del aeroplano en cuanto a tiempo de levantamiento y error en estado estable.
Ma;ana Miercoles nos reuniremos con el grupo para definir como proseguimos.
UAV_TEAM ONLINE
Esto es una prueba de un nuevo producto lanzado por la gente de meebo, "meebome".
Sirve para chatear online desde el blog con una persona que tenga una cuenta meebo.
El user de nuestra cuenta meeboo es "uav_team" el password se los paso por mail.
Los que accedan al blog pueden chatear online con uav_team si este está online o dejar un mensaje en otro caso.
El visitante puede setear un nick temporal en la ventana meebo para que pueda ser identificado.
Es una simple prueba
Sirve para chatear online desde el blog con una persona que tenga una cuenta meebo.
El user de nuestra cuenta meeboo es "uav_team" el password se los paso por mail.
Los que accedan al blog pueden chatear online con uav_team si este está online o dejar un mensaje en otro caso.
El visitante puede setear un nick temporal en la ventana meebo para que pueda ser identificado.
Es una simple prueba
sábado, diciembre 09, 2006
Integracion del Sistema
Ya que estamos en etapas casi finales, y que el sistema gano complejidad, la caja anterior de aluminio quedo chica. Decidi entonces buscar una solucion y termine comprando por 400 pesos algo que esta bastante bueno. La caja es de plastico, por lo que tendremos que hacerle el apantallamiento usando cinta adhesiva metalica, pero tiene ciertas ventajas.
Es liviana, resistente, buenas terminaciones y es estanca (no que precisemos demasiada estanqueidad, pero sirve para la suciedad y por si el bobby se queda en la lluvia otra vez :P )
Tiene una tapa con 4 tornillos de plastico, y el sistema entra bien.
Para tener una idea de disposicion, tome un poco de cinta de enmascarar y presente los distintos componentes, la idea fue dejar el switch RC lo mas accesible a los servos (por eso se encuentra en la tapa) y el amplificador lo mas cerca a los giroscopos (una vez cerrada queda uno "encima" del otro). La idea fue tambien dejar la bateria dentro de la caja.
Queda un poco de espacio todavia para el segundo receptor y su placa correspondiente (tuning de los loops pid)
Tiene una tapa con 4 tornillos de plastico, y el sistema entra bien.
Para tener una idea de disposicion, tome un poco de cinta de enmascarar y presente los distintos componentes, la idea fue dejar el switch RC lo mas accesible a los servos (por eso se encuentra en la tapa) y el amplificador lo mas cerca a los giroscopos (una vez cerrada queda uno "encima" del otro). La idea fue tambien dejar la bateria dentro de la caja.
Queda un poco de espacio todavia para el segundo receptor y su placa correspondiente (tuning de los loops pid)



viernes, diciembre 08, 2006
Creo que tenemos el Kalman listo
Bueno, parece que despues de tanto sufrir llegamos a buen puerto.
El Kalman anterior que habiamos hecho no tenia una referencia para "resetear" los angulos, el que tenemos ahora si.
Lo que hice fue agregar un Kalman anidado para no aumentar la complejidad del actual (recordar que ya era de 9 estados). Es entonces que arme un kalman de 3 estados el cual resetea los angulos mediante el uso de los accelerometros para theta y phi.
Para el angulo psi (heading) lo que uso es el psi del gps si la velocidad es mayor a 2m/s, de lo contrario uso el estado anterior. Lo de la velocidad es porque si bien el gps me da un angulo de heading, este es valido solamente a ciertas velocidades.
Ya sabemos que lo mejor hubiera sido usar una brujula 3d o algun dispositivo absoluto de angulos. Si bien compramos una brujula (que para la practica resulto ser lenta y un tanto imprecisa), el manejo de la interfaz requeria demasiado tiempo, del cual no disponemos. La otra opcion era comprar un dispositivo, sin embargo los sensores de angulos de 3 ejes andan por los 700 dolares en origen.(mas caro que todo nuestro sistema)
El update de los angulos mediante los accelerometros tiene una contrapartida, y es que durante un giro muy largo o durante un ascenso muy prolongado, las medidas de angulos que obtenemos no son buenas. Sin embargo, se puede hacer que el update por kalman2 (asi le llame a la pequeña funcion) se haga durante ciertos instantes convenientes.
El dispositivo ahora esta andando correctamente en la mesa. Saque el muestreo de 8 veces de los gyros (y el caculo de su media) porque demoraban demasiado los loops. Esto hacia que el paso de tiempo discreto fuera demasiado grande, lo que hacia que el filtro divergiera (creo que es por como calculamos ciertas exponenciales de matrices, precisamos deltaTs chicos, tambien tenemos la integracion por Runge-Kutta). Los deltaTs acutales andan entre 0.01 y 0.02 (ideal 0.01)
Cuando muestreabamos mas, los deltaTs llegaban incluso a 0.9 (era demasiado pedir) lo cual provocaba NAN luego de cierto tiempo.
El sistema como dije esta quieto, Andres Chappe, antes, para mejorar el rendimiento lo movia, lo cual hacia que las medidas variaran mas y su media fuera mas cercana a cero. Esto ya no es necesario; Al momento de escribir esto, acaba de terminar un logueo de 30 minutos. El error en la posicion es menor al metro. El error en los angulos esta en el orden de 0.2 grados.
Ahora lo que falta es subirse al auto y ver que nos da un log del camino.
Hoy es un gran dia :D
El Kalman anterior que habiamos hecho no tenia una referencia para "resetear" los angulos, el que tenemos ahora si.
Lo que hice fue agregar un Kalman anidado para no aumentar la complejidad del actual (recordar que ya era de 9 estados). Es entonces que arme un kalman de 3 estados el cual resetea los angulos mediante el uso de los accelerometros para theta y phi.
Para el angulo psi (heading) lo que uso es el psi del gps si la velocidad es mayor a 2m/s, de lo contrario uso el estado anterior. Lo de la velocidad es porque si bien el gps me da un angulo de heading, este es valido solamente a ciertas velocidades.
Ya sabemos que lo mejor hubiera sido usar una brujula 3d o algun dispositivo absoluto de angulos. Si bien compramos una brujula (que para la practica resulto ser lenta y un tanto imprecisa), el manejo de la interfaz requeria demasiado tiempo, del cual no disponemos. La otra opcion era comprar un dispositivo, sin embargo los sensores de angulos de 3 ejes andan por los 700 dolares en origen.(mas caro que todo nuestro sistema)
El update de los angulos mediante los accelerometros tiene una contrapartida, y es que durante un giro muy largo o durante un ascenso muy prolongado, las medidas de angulos que obtenemos no son buenas. Sin embargo, se puede hacer que el update por kalman2 (asi le llame a la pequeña funcion) se haga durante ciertos instantes convenientes.
El dispositivo ahora esta andando correctamente en la mesa. Saque el muestreo de 8 veces de los gyros (y el caculo de su media) porque demoraban demasiado los loops. Esto hacia que el paso de tiempo discreto fuera demasiado grande, lo que hacia que el filtro divergiera (creo que es por como calculamos ciertas exponenciales de matrices, precisamos deltaTs chicos, tambien tenemos la integracion por Runge-Kutta). Los deltaTs acutales andan entre 0.01 y 0.02 (ideal 0.01)
Cuando muestreabamos mas, los deltaTs llegaban incluso a 0.9 (era demasiado pedir) lo cual provocaba NAN luego de cierto tiempo.
El sistema como dije esta quieto, Andres Chappe, antes, para mejorar el rendimiento lo movia, lo cual hacia que las medidas variaran mas y su media fuera mas cercana a cero. Esto ya no es necesario; Al momento de escribir esto, acaba de terminar un logueo de 30 minutos. El error en la posicion es menor al metro. El error en los angulos esta en el orden de 0.2 grados.
Ahora lo que falta es subirse al auto y ver que nos da un log del camino.
Hoy es un gran dia :D
lunes, diciembre 04, 2006
Segundo PIC
Como ya comentamos en algún momento vamos a hacer el tuning de los PID online, durante el vuelo. Para realizar el tuning de los PID seguramente utilizaremos el método de Ziegler Nichols o algún otro que consideremos conveniente para nuestro caso.
Para realizar este tuning en forma remota se nos ocurre utilizar una segunda radio con una frecuencia diferente a la de control de vuelo manual. Utilizaríamos 3 o cuatros canales en modo on-off para generar una palabra digital y un canal para generar un valor analógico. La palabra digital identifica a un parámetro de un controlador y el valor analógico se corresponde con el valor que deseamos que tenga el parámtro. Además podemos utilizar un canal on-off para informarle al procesador que la palabra digital y el valor del parámetro están disponibles para leer.
El pic se encargaría de muestrear las salidas PWM del receptor (Rx), generar la palabra digital y el valor analógico correspondiente al valor que deseamos que tenga el parámetro definido por la palabra digital.
Luego el Robostix lee la entrada analógica a través de un ADC y lee la palabra digital y la señal de habilitación a través de los pines de un puerto GPIO (General Purpose Input Output).
Para realizar este tuning en forma remota se nos ocurre utilizar una segunda radio con una frecuencia diferente a la de control de vuelo manual. Utilizaríamos 3 o cuatros canales en modo on-off para generar una palabra digital y un canal para generar un valor analógico. La palabra digital identifica a un parámetro de un controlador y el valor analógico se corresponde con el valor que deseamos que tenga el parámtro. Además podemos utilizar un canal on-off para informarle al procesador que la palabra digital y el valor del parámetro están disponibles para leer.
El pic se encargaría de muestrear las salidas PWM del receptor (Rx), generar la palabra digital y el valor analógico correspondiente al valor que deseamos que tenga el parámetro definido por la palabra digital.
Luego el Robostix lee la entrada analógica a través de un ADC y lee la palabra digital y la señal de habilitación a través de los pines de un puerto GPIO (General Purpose Input Output).
Resultados de Kalman
Con la amplificación por 6 y con la nueva calibración de los acelerómetros, tomando en cuenta los rate reales de cada uno, hemos mejorado el funcionamiento del filtro de Kalman. Los datos ahora no divergen como antes. Notamos que el movimiento aleatorio en torno de las posiciones de equilibro ayuda a mantener el valor.
Tenemos un problema de que en determinado momento los valores pasaron a NaN sin previamente percibir un crecimiento sostenido de los mismos, por tanto no parece ser que los datos divergan por un tema de acumulación de errores sino que puede deberse a que en algún cociente se esté produciendo una división por cero.
Vamos a implementar una corrección de los gyros con estimaciones obtenidas a partir de los valores de los acelerómetros. Cuando el vuelo es recto y nivelado a una velocidad constante tenemos que las aceleraciones ax, ay , az son despreciables y por tanto las aceleraciones que sensan los acelerómetros solo tienen las proyecciones de la gravedad.
ax = -g.sin(theta)
ay = g.cos(theta).sin(phi)
az = g.cos(theta).cos(phi)
por tanto:
theta = atan[ -ax/(ay.sin(phi) + az.cons(phi)) ]
phi = atan(ay/az)
Para el caso de psi debemos utilizar el GPS y determinar la dirección de vuelo a partir de dos valores consecutivos.
Tenemos un problema de que en determinado momento los valores pasaron a NaN sin previamente percibir un crecimiento sostenido de los mismos, por tanto no parece ser que los datos divergan por un tema de acumulación de errores sino que puede deberse a que en algún cociente se esté produciendo una división por cero.
Vamos a implementar una corrección de los gyros con estimaciones obtenidas a partir de los valores de los acelerómetros. Cuando el vuelo es recto y nivelado a una velocidad constante tenemos que las aceleraciones ax, ay , az son despreciables y por tanto las aceleraciones que sensan los acelerómetros solo tienen las proyecciones de la gravedad.
ax = -g.sin(theta)
ay = g.cos(theta).sin(phi)
az = g.cos(theta).cos(phi)
por tanto:
theta = atan[ -ax/(ay.sin(phi) + az.cons(phi)) ]
phi = atan(ay/az)
Para el caso de psi debemos utilizar el GPS y determinar la dirección de vuelo a partir de dos valores consecutivos.
sábado, diciembre 02, 2006
Resultados de la Calibración
Se calibraron los tres gyros para determinar la transferencia de cada uno.
Para filtrar el ruído de las medidas se promediaron las muestras para una velocidad dada.
Las velocidades angulares en grad/sec utilizadas para el experimento fueron las siguientes:
Gráfica de las transferencias:



Para filtrar el ruído de las medidas se promediaron las muestras para una velocidad dada.
Las velocidades angulares en grad/sec utilizadas para el experimento fueron las siguientes:
{ -60 , -36 , -18 ,-9 , -4.5 , 0 , 4.5 , 9 , 18 , 36 ,60 }
para cada velocidad se realizó el muestreo a 1 Hz durante 3 min.
Gráfica de las transferencias:



Resultados:
| mV/grad | valor null (mV) | |
| giroP | 28.9 | 2169.4 |
| giroQ | 28.1 | 2099.1 |
| gyroR | 29.5 | 2588.6 |
Calibración de Gyros amplificados
El gyro tiene las siguientes especificaciones


Se modificó la placa de amplificación eliminando el filtro RC de la entrada no inversora, solo se dejó la resistencia de polarización a tierra y se aumentó la ganacia hasta 6.
Por tanto ahora tenemos aproximadamente 30 mV/grad, siendo 2.5 volts el valor correspondiente a velocidad nula.

Se modificó la placa de amplificación eliminando el filtro RC de la entrada no inversora, solo se dejó la resistencia de polarización a tierra y se aumentó la ganacia hasta 6.
Por tanto ahora tenemos aproximadamente 30 mV/grad, siendo 2.5 volts el valor correspondiente a velocidad nula.
jueves, noviembre 30, 2006
Switch entre automatico y manual pronto y sin errores
Finalmente hoy logramos poner en marcha la placa del switch entre el modo automatico y manual.
Se hicieron varias placas que por distintas razones fallaron en el cometido.

Esta es una foto de la serie de placas en orden cronologico de izquierda a derecha

Se hicieron varias placas que por distintas razones fallaron en el cometido.
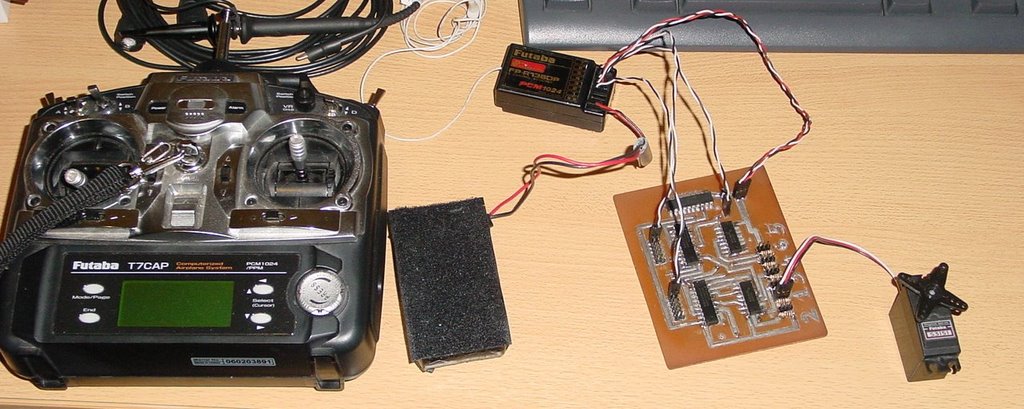
Esta es una foto de la serie de placas en orden cronologico de izquierda a derecha

miércoles, noviembre 29, 2006
Switch
Esta placa ha dado que hablar pues hemos tenido muchos pequeños inconvenientes, pero ahora ya tenemos el nuevo integrado listo para el montaje.
La placa anterior hacia bien el switcheo pero el servo por momentos presentaba una perturbación entorno de la posición de control. Se encontró que la salida del PIC estando en nivel alto presentaba una bajada y volvía a subir inmediatamente en forma aleatoria cada 1 sec, 2 sec o hasta 10 sec.
La entrada al PIC proveniente del Ch7 del Rx no estaba buffereada y la señal PWM del ch7 del Rx tiene un VH = 2.8 volts (aprox.) por tanto puede ser que en presencia de ruído, en esta señal, el PIC confunda la entrada interpretando una bajada cuando no lo es.
La nueva placa tiene buffereada la entrada del pic. Se probó en protoboard y funciona correctamente, la salida del PIC no tiene bajada alguna y el servo se mantiene en la posición deseada sin presencia de ruído.
Hoy realizamos el montaje.
La placa anterior hacia bien el switcheo pero el servo por momentos presentaba una perturbación entorno de la posición de control. Se encontró que la salida del PIC estando en nivel alto presentaba una bajada y volvía a subir inmediatamente en forma aleatoria cada 1 sec, 2 sec o hasta 10 sec.
La entrada al PIC proveniente del Ch7 del Rx no estaba buffereada y la señal PWM del ch7 del Rx tiene un VH = 2.8 volts (aprox.) por tanto puede ser que en presencia de ruído, en esta señal, el PIC confunda la entrada interpretando una bajada cuando no lo es.
La nueva placa tiene buffereada la entrada del pic. Se probó en protoboard y funciona correctamente, la salida del PIC no tiene bajada alguna y el servo se mantiene en la posición deseada sin presencia de ruído.
Hoy realizamos el montaje.
Todo listo para calibrar
Ayer Suttner dejo lista y probada la placa con los amplificadores de ganancia 3 en señal para colocar a la salida de los gyros.
Hoy la idea es intercalar dicha placa entre la salida del gyro y la entrada al ADC del Robostix. Luego colocar el sistema en el Rotratonic, ponerlo a girar a una velocidad angular conocida y relevar la velocidad angular sensada para luego calibrar
Hoy la idea es intercalar dicha placa entre la salida del gyro y la entrada al ADC del Robostix. Luego colocar el sistema en el Rotratonic, ponerlo a girar a una velocidad angular conocida y relevar la velocidad angular sensada para luego calibrar
martes, noviembre 28, 2006
Rotatronic
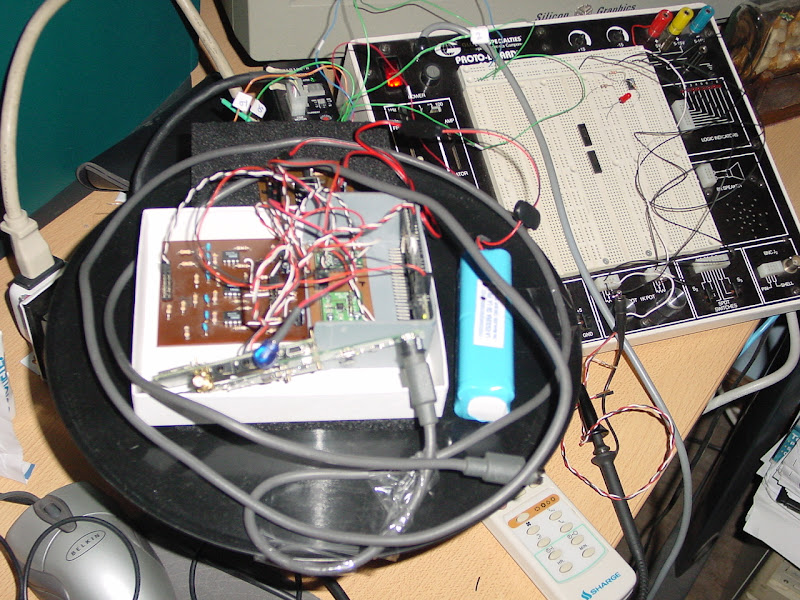
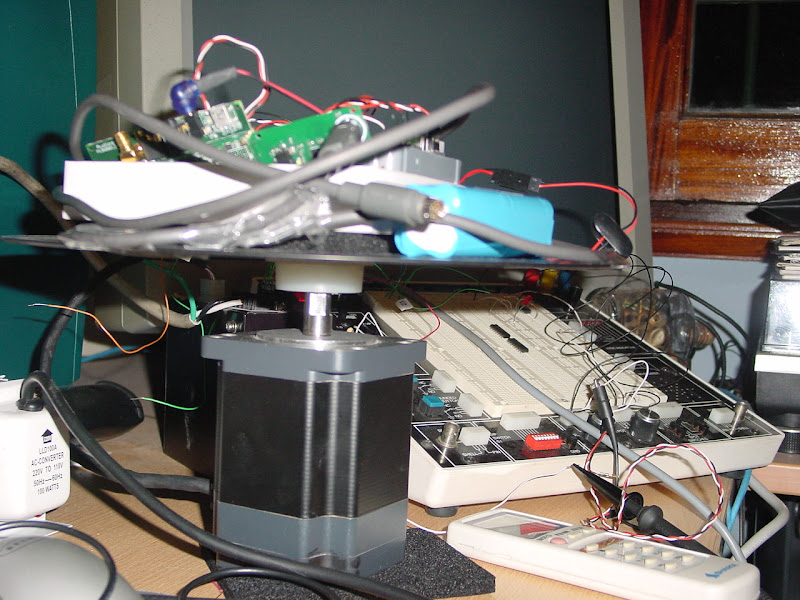
Rodrigo fabricó la plataforma para realizar la calibración de los gyros con un motor paso a paso y un driver controlado mediante un potenciometro. Como base se acopló un disco de vinilo al eje del motor. Con el Rotratronic podemos lograr velocidades angulares pequeñas y precisas.
Con el osciloscopio digital se va a medir la cantidad de pulsos que el driver envía al paso a paso, a partir de esto obtenemos la velocidad angular (w=0.036*pasos)
0.036 es la maxima resolucion que el driver ofrece.
Para la calibración se va a colocar op amp no inversores a la salida del los gyros. Ayer se hizo la placa, hoy se hace el montaje.
Con el osciloscopio digital se va a medir la cantidad de pulsos que el driver envía al paso a paso, a partir de esto obtenemos la velocidad angular (w=0.036*pasos)
0.036 es la maxima resolucion que el driver ofrece.
Para la calibración se va a colocar op amp no inversores a la salida del los gyros. Ayer se hizo la placa, hoy se hace el montaje.
lunes, noviembre 27, 2006
Calibración de Gyros
Para calibrar los giros los ponemos a girar a una velocidad conocida y precisa y relevamos la salida durante un determinado tiempo. Luego analizamos las muestras para determinar la curva de transferencia velocidad/voltaje y determinamos si existe deriva. También relevamos la salida a distinta temperatura para deteminar la curva temp/voltaje a velocidad angular constante.
Hasta el momento lo que haciamos era colocar el circuito (gyros + robostix + gumstix) sobre una bandeja girando a 33 rpm.
33 rpm = 33* 360 grad / 60 sec = 198 grad/sec
Esta velocidad angular es bastante grande y queremos realizar la calibración a un valor menor.
Para esto estamos armando una plataforma para colocar el circuito que sea movida por un motor con velocidad variable por voltaje. La velocidad será determinada por un tacómetro.
Hasta el momento lo que haciamos era colocar el circuito (gyros + robostix + gumstix) sobre una bandeja girando a 33 rpm.
33 rpm = 33* 360 grad / 60 sec = 198 grad/sec
Esta velocidad angular es bastante grande y queremos realizar la calibración a un valor menor.
Para esto estamos armando una plataforma para colocar el circuito que sea movida por un motor con velocidad variable por voltaje. La velocidad será determinada por un tacómetro.
Amplificar los Gyros
Los gyros tienen un rango de +/- 300 grad/sec. con una salida analógica de 0 - 5 volts, siendo 2.5 volts la salida correspondiente a la velocidad angular nula.
El robostix dispone de conversores ADC de 10 bits o sea disponemos de 1024 pasos y tenemos un error de +/- 1 bit.
Cuánto es un error de un bit ?
(5-2.5)volts/1024 pasos = 0.00244140625 volts/paso
2.5 volts = 300 grad/sec => 1 paso = 0.0024414625 volts = 0.29296875 grad/sec
integrando durante un sec : delta_angulo = 0.29296875 grad
El error generado por el ADC es realmente importante? Es siempre positivo?
El rango del gyro es demasiado grande para nuestra aplicación y el conversor está siendo desaprovechado, sólo algunos bits resultan útiles.
Colocando una resistencia externa entre dos pines de salida del gyro se puede modificar el rango. Otra opción es colocar un amplificador a la salida del gyro. De esta forma logramos que el ADC sea mas preciso porque el numero de grad/sec por paso es menor.
Por ejemplo si ahora tenemos
+2.5 volts = 100 grad/sec => 1 paso = 0.09765625 grad/sec
integrando durante un sec: delta_anglo = 0.09765625 grados
Suttner diseño una placa con amplificadores operacionales rail to rail en configuración no inversora de ganacia 3 para colocar a la salida de los gyros.
El robostix dispone de conversores ADC de 10 bits o sea disponemos de 1024 pasos y tenemos un error de +/- 1 bit.
Cuánto es un error de un bit ?
(5-2.5)volts/1024 pasos = 0.00244140625 volts/paso
2.5 volts = 300 grad/sec => 1 paso = 0.0024414625 volts = 0.29296875 grad/sec
integrando durante un sec : delta_angulo = 0.29296875 grad
El error generado por el ADC es realmente importante? Es siempre positivo?
El rango del gyro es demasiado grande para nuestra aplicación y el conversor está siendo desaprovechado, sólo algunos bits resultan útiles.
Colocando una resistencia externa entre dos pines de salida del gyro se puede modificar el rango. Otra opción es colocar un amplificador a la salida del gyro. De esta forma logramos que el ADC sea mas preciso porque el numero de grad/sec por paso es menor.
Por ejemplo si ahora tenemos
+2.5 volts = 100 grad/sec => 1 paso = 0.09765625 grad/sec
integrando durante un sec: delta_anglo = 0.09765625 grados
Suttner diseño una placa con amplificadores operacionales rail to rail en configuración no inversora de ganacia 3 para colocar a la salida de los gyros.
jueves, noviembre 23, 2006
Mail del Proyecto
(NEW)
SE CREO MAIL DEL PROYECTO PARA QUE CUALQUIERA DE LOS MIEMBROS TENGA ACCESO AL MISMO Y CONCENTRAR LOS MAIL EN UNA SOLA DIRECCION
mail:
uav.amfo1@gmail.com
Tiempo de integración
Para realizar la integración la idea era tomar muestras en forma periódica cada un cierto tiempo prefijado y multiplicar el valor de la muestra por este intervalo de tiempo. Para cumplir con esto fijamos un delta_t de 0.01 sec y si el tiempo del proceso era menor se debía esperar a completar ese tiempo para tomar una nueva muestra.
El problema es que el tiempo de procesamiento estaba superando los 0.01 sec y por tanto la condición "(t2-t1) >= delta_t" siempre se cumplia e inmediatamente se tomaba la nueva muestra. El tiempo entre muestras era variable y por tanto el tiempo de integración no debía ser el prefijado. Se corrigió este error haciendo que el delta_t fuese variable y correspondiese al tiempo entre muestras.
Se probó nuevamente y seguimos con problemas. Luego de mucho rato encontramos que los gyros estando la IMU en reposo varían su salida entre 0.001 y 0.003 rad/sec (siempre positivo). Si se integra cada 1 sec tenemos que el delta_angulo estaría entre 4 y 10 deg. El problema es que los valores son siempre positivos, si la variación fuese aleatoria con media nula no habría problemas pues durante la integración se compensarían estas variaciones dando un valor de salida my próximo a cero.
Hoy vamos a realizar algunas pruebas para determinar por qué sucede esto.
El problema es que el tiempo de procesamiento estaba superando los 0.01 sec y por tanto la condición "(t2-t1) >= delta_t" siempre se cumplia e inmediatamente se tomaba la nueva muestra. El tiempo entre muestras era variable y por tanto el tiempo de integración no debía ser el prefijado. Se corrigió este error haciendo que el delta_t fuese variable y correspondiese al tiempo entre muestras.
Se probó nuevamente y seguimos con problemas. Luego de mucho rato encontramos que los gyros estando la IMU en reposo varían su salida entre 0.001 y 0.003 rad/sec (siempre positivo). Si se integra cada 1 sec tenemos que el delta_angulo estaría entre 4 y 10 deg. El problema es que los valores son siempre positivos, si la variación fuese aleatoria con media nula no habría problemas pues durante la integración se compensarían estas variaciones dando un valor de salida my próximo a cero.
Hoy vamos a realizar algunas pruebas para determinar por qué sucede esto.
miércoles, noviembre 22, 2006
Datos en tiempo real
Continuamos probando Kalman y tratando de encontrar bugs que hacen que el funcionamiento no sea el esperado.
A fin de poder visualizar los datos de los sensores en tiempo real, Rodrigo implementó una ventana (función window de C) que nos permite visualizar en pantalla las coordenadas de la posición, las velocidades angulares, los ángulos de Euler, las aceleraciones y las velocidades lineales. Antes lo que hacíamos era loguear estos datos cada cierto delta_t en un archivo txt y luego mirar el archivo analizando la secuencia de datos registrados.
Luego de contar con esta herramienta pudimos determinar que tenemos un problema no menor con la salida de los gyros. Cuando rotamos noventa grados la IMU (Inercial Measure Unit) según uno de sus ejes (X,Y o Z) éste debería tomar el valor 90 grados y en pantalla el valor mostrado es 20 grados. Lo bueno es que este comportamiento no depende del ángulo de giro. Al parecer es un problema de escala. Hoy vamos a chequear por que sucede esto.
Hay que tener presente que estos ángulos influyen en los valores de las aceleraciones ya que cuando el eje Z no concide con el vector de gravedad la misma debe proyectarse en cada eje. Luego las aceleraciones influyen en el cálculo de la velocidad y en la posición, por tanto es muy importante que los valores de los ángulos estén correctos.
PLACA SWITCH CASI LISTA
Ayer terminamos de hacer el layout en el Eagle de la placa switch doble cara. Hoy comemos el cobre, realizamos el montaje y el testeo de la misma.
Materiales necesarios
Materiales necesarios
| componente | cantidad |
| PIC 16F690 | 1 |
| BUFFER 74244 | 2 |
| MUX 74157 | 2 |
| PINES 1X6 | 2 |
| PINES 1X3 | 6 |
| PINES 1X2 | 3 |
| SOCALO 20 PINES | 3 |
| SOCALO 16 PINES | 2 |
| CONDENSADOR CERAMICO 0.1 microF | 6 |
martes, noviembre 21, 2006
Tuning Online ...
 La idea de Rodrigo para realizar el tuning online valiendose de otro trasmisor con frecuencia distinta a la del Tx de vuelo y uno o unos pics es posible.
La idea de Rodrigo para realizar el tuning online valiendose de otro trasmisor con frecuencia distinta a la del Tx de vuelo y uno o unos pics es posible.El pic cuenta con 3 puertos de entrada que pueden decodificar las señales PWM que salen de este segundo Rx y generar una señal analógica proporcional. Luego esta señal sería la entrada de un ADC del Robostix. El segundo Tx tiene 6 canales, por tanto puede mapearse cada canal con un parámetro de un controlador PID (Kp, Ki, Kd).
Aún resta resolver si esto se va a utilizar y en caso de hacerlo, cuantos PIC utilizaríamos
lunes, noviembre 20, 2006
Calibración de Acelerometros y Gyros
El sabado en la noche montamos todo el hardware en un auto y salimos a relevar datos de la trayectoria (posición, aceleraciones, velocidades y ángulos de attitude). Con un lapto mediante una interfaz inalámbrica con conectabamos al Gumstix para dar las instrucciones y grabar varias corridas. Los datos se almacenaban en archivos txt.
Luego de terminar el recorrido observamos los valores relevados y encontramos que luego de un rato los valores divergen (NAN). Creemos que el problema radica en la calibración de los sensores, tanto acelerometros como giros. Por ejemplo el acelerómetro retorna una aceleración positiva cuando debería tener valor cero y por tanto cuando se integre el valor cresca de manera sostenida. Algo similar sucede con los giros, ya que estos sensan velocidades angulares las cuales son integradas para obtener los ángulos theta, phi y psi.
Los acelerómetros y Gyros varían su salida con la temperatura, por tanto el domingo se implementó un experimento para determinar la variación de estos sensores con la temperatura ambiente. Se varió la temperatura ambiente en el rango de 25º C hasta 40ºC.
Hoy se analizarán los datos para ajustar estos sensores.
Luego de terminar el recorrido observamos los valores relevados y encontramos que luego de un rato los valores divergen (NAN). Creemos que el problema radica en la calibración de los sensores, tanto acelerometros como giros. Por ejemplo el acelerómetro retorna una aceleración positiva cuando debería tener valor cero y por tanto cuando se integre el valor cresca de manera sostenida. Algo similar sucede con los giros, ya que estos sensan velocidades angulares las cuales son integradas para obtener los ángulos theta, phi y psi.
Los acelerómetros y Gyros varían su salida con la temperatura, por tanto el domingo se implementó un experimento para determinar la variación de estos sensores con la temperatura ambiente. Se varió la temperatura ambiente en el rango de 25º C hasta 40ºC.
Hoy se analizarán los datos para ajustar estos sensores.
Prueba Switch
El sabado se armó en protoboard el circuito que compone la placa de switch. La salida del pic respondía correctamente al comando on-off correspondiente al ch7 del Tx RC, pero el MUX no switcheaba corrrectamente las entradas y el servo presentaba una especie de temblor respecto de su posición de equilibrio.
El domingo se probaron las distintas partes del circuito con la ayuda de un osciloscopio digital Tektronix. Se observó los siguiente:
Alimentación del Rx (pack batería NiMh 2400 mAh) = 4.8 v
Cuando conectabamos el receptor al MUX intruducía muchisimo ruído hacia atrás y la señal se control del servo quedaba totalmente deformada. Para solucionar esto se colocaron condensadores cerámicos entre la señal de salida y tierra de manera de filtrar la señal de alta frecuencia que se superponía a la señal de control. También se agregaron condensadores de polister de 0.1 microF para filtrar la alimentación de los integrados.
Todas las señales son buffereadas, las que llegan del Rx, las que controlan los servos y la salida del pic.
El domingo se probaron las distintas partes del circuito con la ayuda de un osciloscopio digital Tektronix. Se observó los siguiente:
Alimentación del Rx (pack batería NiMh 2400 mAh) = 4.8 v
- Salida de los canales del Rx : señal PWM T=14.3 msec ( f=70 Hz), VL = 0 volts, VH = 2.8 volts, Wpulse_min = 0.980 ms, Wpulse_max = 2.050 msec
- Señal PWM a la salida del Buffer 74244 : mantiene los datos anteriores pero mejora VH = 4.8 volts.
Cuando conectabamos el receptor al MUX intruducía muchisimo ruído hacia atrás y la señal se control del servo quedaba totalmente deformada. Para solucionar esto se colocaron condensadores cerámicos entre la señal de salida y tierra de manera de filtrar la señal de alta frecuencia que se superponía a la señal de control. También se agregaron condensadores de polister de 0.1 microF para filtrar la alimentación de los integrados.
Todas las señales son buffereadas, las que llegan del Rx, las que controlan los servos y la salida del pic.
sábado, noviembre 18, 2006
Idea para el "tuning" de los PID
OK, son las 7 am y no me puedo dormir de la emocion, y dentro de las cosas que se me maquinaron en la cabeza se me ocurrio esta.
Ahora que tenemos un PIC andando gracias al señor chappe y su amigo Danilo, y que en la radio tenemos una especie de pote, es decir, variamos un PWM de a pequeños pasos, lo que podemos hacer es lo siguiente.... o mejor aun, usamos un transmisor extra y un receptor extra, con distintas frecuencias para no tocar tanto nuestro sistema final...
La idea es, de ese pote que variamos, con el PIC convertimos el PWM a un voltaje de salida (hay que ver primero si es posible)
y luego lo muestreamos con un ADC, de ahi vamos regulando en "tiempo real" la ganancia de ponele un PID que elegimos al principio. Entonces para los pasos del método de "tuning" vamos armando distintas rutinas para ajustar por bloques PIDs y por parámetros (Kp, Ti, Td)
Tal vez es cualquier cosa, pero queda anotada por las dudas.
Hasta dentro de un rato
Ahora que tenemos un PIC andando gracias al señor chappe y su amigo Danilo, y que en la radio tenemos una especie de pote, es decir, variamos un PWM de a pequeños pasos, lo que podemos hacer es lo siguiente.... o mejor aun, usamos un transmisor extra y un receptor extra, con distintas frecuencias para no tocar tanto nuestro sistema final...
La idea es, de ese pote que variamos, con el PIC convertimos el PWM a un voltaje de salida (hay que ver primero si es posible)
y luego lo muestreamos con un ADC, de ahi vamos regulando en "tiempo real" la ganancia de ponele un PID que elegimos al principio. Entonces para los pasos del método de "tuning" vamos armando distintas rutinas para ajustar por bloques PIDs y por parámetros (Kp, Ti, Td)
Tal vez es cualquier cosa, pero queda anotada por las dudas.
Hasta dentro de un rato
Kalman... que no ni no!
Ok, 4:02 am del mismo sabado :D
solo queria agregar mi felicidad al Blog :D
es tremenda emocion ver como movemos la caja y el angulo aparece, y como no nos movemos en el espacio, y la posicion se queda quieta, es decir no divergemos!!!
arriba que queda menos!!!
solo queria agregar mi felicidad al Blog :D
es tremenda emocion ver como movemos la caja y el angulo aparece, y como no nos movemos en el espacio, y la posicion se queda quieta, es decir no divergemos!!!
arriba que queda menos!!!
viernes, noviembre 17, 2006
Fotos del Hardware
Chosa necesito fotos
Hay registrar las cosas antes de meter el sistema en la caja negra y estaría bueno tener fotos del conexionado previo en las etapas de diseño
gracias
Hay registrar las cosas antes de meter el sistema en la caja negra y estaría bueno tener fotos del conexionado previo en las etapas de diseño
gracias
Weather weekend 18 nov 2006
El pronóstico del tiempo para este fin de se,ana no prevee lluvias (fuente AccuWeather).
Esperamos poder realizar pruebas con el avión para evaluar los cambios que se hicieron al avión y además montar la electrónica con los sensores para relevar datos del vuelo.
Pronóstico aqui View Blog
Esperamos poder realizar pruebas con el avión para evaluar los cambios que se hicieron al avión y además montar la electrónica con los sensores para relevar datos del vuelo.
Pronóstico aqui View Blog
Borrador enviado
Ayer jueves enviamos un borrador preliminar con algo de documentación, algo no muy formal pero que da una mejor idea del proyecto. Esperamos comunicarnos con el tutor en estos días para coordinar futuras reuniones.
Filtro de Kalman - Cielo o Infierno?
El filtro de Kalman es el algoritmo implementado en C encargado de producir las estimaciones que llegan a los controladores PIDs a partir de las señales obtenidas de los sensores.
El filtro de Kalman toma en cuenta la historia del sistema, los errores de medida del proceso y los errores producidos por el ruidoy produce las señales de salida (estimaciones).
Si este filtro funciona correctamente el sistema se comporta de manera esperada, pero si este filtro no funciona bien se pueden obtener soluciones sesgadas completamente erróneas.
La "semilla" para el filtro de Kalman resulta vital para el correcto funcionamiento del mismo.
Placa Switch
La placa Switch esta compuesta por el PIC 16F690 que decodifica la señal PWM que proporciona en ch7 del Rx y genera la correspondiente señal de select del MUX que permite que el control pase de manual a auto y viceversa.
Las señales para los servos provenientes del sistema de control y del Rx son pasadas por unos Buffers antes de ingresar al Mux.
Ayer se realizó el esquemático de dicha placa y el layout de la misma. Hoy viernes se va a montar el circuito en protoboard y si funciona correctamente se procederá a realizar el circuito impreso en placa doble cara. Luego se hará el montaje, se probará y se integrará al resto del hardware para comprobar el funcionamiento de la misma en condiciones reales.
Las señales para los servos provenientes del sistema de control y del Rx son pasadas por unos Buffers antes de ingresar al Mux.
Ayer se realizó el esquemático de dicha placa y el layout de la misma. Hoy viernes se va a montar el circuito en protoboard y si funciona correctamente se procederá a realizar el circuito impreso en placa doble cara. Luego se hará el montaje, se probará y se integrará al resto del hardware para comprobar el funcionamiento de la misma en condiciones reales.
Alimetación para hardware 3V y 5V
Los sensores en paricular, gyros y acelerometros, requiere un voltaje estable para funcionar de manera correcta ya que depende de un voltaje de referencia.
No todas las placas manejan el mismo voltaje, por ejemplo los gyros utilizan 5 volts, los acelerometros utilizan 3 volts, el gumstix y robostix utililzan 5 volts, y la placa switch compuesta por el pic 16F690, buffers y muxs manejan 5 volts.
Para tener en cuenta estos puntos se fabricó un pack de baterías de 8 volts y se fabricó una placa que contiene 2 reguladores de voltajes que proveen los 3 volts y 5volts requeridos. De esta manera aseguramos un voltaje estable que allimenta las distintas placas de hardware, mientras el voltaje de las baterías decrece con el tiempo.
Se midio con una fuente de laboratorio HP el consumo en vacío de esta placa con los reguladores (placa fuente) y el consumo total cuando se conecta todo el hardware alimentado por esta placa fuente. En vacío registramos menos de 30 mA y con todo conectado registramos 180 mA (sin placa switch).
La potencia para los servos y receptor va a ser proporcionada por un pack de baterías diferentes dado que cuando los servos realizan mucho esfuerzo se produce un pico en el consumo de corriente y la caída de voltaje del pack es notoria. Por tal motivo disponemos de un pack independiente del del hardware y de mayor capacidad que este. Los pack tienen las tierras en común para tener la misma referencia, pues la señal de control de los servos es comandada directamente por el receptor en modo manual o comandada por el sistema de control autonomo cuando esta en modo auto.
No todas las placas manejan el mismo voltaje, por ejemplo los gyros utilizan 5 volts, los acelerometros utilizan 3 volts, el gumstix y robostix utililzan 5 volts, y la placa switch compuesta por el pic 16F690, buffers y muxs manejan 5 volts.
Para tener en cuenta estos puntos se fabricó un pack de baterías de 8 volts y se fabricó una placa que contiene 2 reguladores de voltajes que proveen los 3 volts y 5volts requeridos. De esta manera aseguramos un voltaje estable que allimenta las distintas placas de hardware, mientras el voltaje de las baterías decrece con el tiempo.
Se midio con una fuente de laboratorio HP el consumo en vacío de esta placa con los reguladores (placa fuente) y el consumo total cuando se conecta todo el hardware alimentado por esta placa fuente. En vacío registramos menos de 30 mA y con todo conectado registramos 180 mA (sin placa switch).
La potencia para los servos y receptor va a ser proporcionada por un pack de baterías diferentes dado que cuando los servos realizan mucho esfuerzo se produce un pico en el consumo de corriente y la caída de voltaje del pack es notoria. Por tal motivo disponemos de un pack independiente del del hardware y de mayor capacidad que este. Los pack tienen las tierras en común para tener la misma referencia, pues la señal de control de los servos es comandada directamente por el receptor en modo manual o comandada por el sistema de control autonomo cuando esta en modo auto.
miércoles, noviembre 15, 2006
pic funcionando
Despues de sufrir un poco el pic 16F690 quedó funcionando correctamente.El siguente paso montar en protoboard integrando el MUX y los Buffers, y después hacer la placa y montar los componentes y probar su funcionamiento integrado al sistema de control.
Montaje de hardware y otras cosas
6:30 am... Termine de montar el hardware en poscicion ortogonal y conecte todos los sensores juntos.
Luego de corregir offsets de ADCs y cambiar la bateria de 5V por una fuente a 8V pasando por los reguladores a 5V y 3V, los ADC quedaron estables y las medidas correctas... estando quieta la plataforma se lee: 0,0,9.8 (ax,ay,az) y 0,0,0 (p,q,r). Ojo con el tema de la bateria bajando su voltaje, puede llevar a la locura :). Leo consumo de 170 mA a 8.8V en la fuente, para tener una primera idea de consumo de robostix+sensores.
Dentro de unas horas cuando me levante y con un poco de cafe, modifico el codigo del filtro de Kalman, encontre unos errores chotos que tengo que arreglar. Otra cosa que hay que hacer es armar el pack de baterias para el combo en total, asi que voy a hacer un estimativo de todo el equipo para tener el pack armado. Y finalmente hay que hacer una placa decente para los pobres reguladores, es decir, con mas de dos salidas :-P, calientan bastante los tipos... no se si es muy bueno eso :S
Luego de corregir offsets de ADCs y cambiar la bateria de 5V por una fuente a 8V pasando por los reguladores a 5V y 3V, los ADC quedaron estables y las medidas correctas... estando quieta la plataforma se lee: 0,0,9.8 (ax,ay,az) y 0,0,0 (p,q,r). Ojo con el tema de la bateria bajando su voltaje, puede llevar a la locura :). Leo consumo de 170 mA a 8.8V en la fuente, para tener una primera idea de consumo de robostix+sensores.
Dentro de unas horas cuando me levante y con un poco de cafe, modifico el codigo del filtro de Kalman, encontre unos errores chotos que tengo que arreglar. Otra cosa que hay que hacer es armar el pack de baterias para el combo en total, asi que voy a hacer un estimativo de todo el equipo para tener el pack armado. Y finalmente hay que hacer una placa decente para los pobres reguladores, es decir, con mas de dos salidas :-P, calientan bastante los tipos... no se si es muy bueno eso :S
martes, noviembre 14, 2006
Documentación
En este momento me encuentro realizando la documentación del proyecto.
Para el miercoles espero tener redondeada la documentación del algoritmo elegido para realizar el control para poder entregarla a nuestro tutor.
Y en cuanto A. chappe me mande la docmentación del switch sera integrada al documento final.
Para el miercoles espero tener redondeada la documentación del algoritmo elegido para realizar el control para poder entregarla a nuestro tutor.
Y en cuanto A. chappe me mande la docmentación del switch sera integrada al documento final.
Alguna dificultad con el PIC
Se realizó el programa assembler para grabar el PIC 16F628, pero al momento de realizar el grabado nos encontramos con que la placa de grabado no reconocía este modelo, por tanto hubo que comprar otro PIC.
Ahora es se va a utilizar el PIC 16F690, también de Microchip, que tiene características similares al anterior, pero donde los registros de funciones especiales no son los mismo y los bancos de memoria también tienen alguna diferencia. Hubo que estudiar el manual de este modelo de PIC y rehacer el código assembler.
Ayer no pudimos terminar, trabajamos hasta las 01:00 am y dejamos el código escrito, hoy se realiza la compilación y la prueba de funcionamiento. Para la prueba se va a rutear la salida hacia un led de la placa de prototipado del kit de grabado y se va a generar la entrada usando el ch7 del Rx comandado por el Tx de RC.
Ahora es se va a utilizar el PIC 16F690, también de Microchip, que tiene características similares al anterior, pero donde los registros de funciones especiales no son los mismo y los bancos de memoria también tienen alguna diferencia. Hubo que estudiar el manual de este modelo de PIC y rehacer el código assembler.
Ayer no pudimos terminar, trabajamos hasta las 01:00 am y dejamos el código escrito, hoy se realiza la compilación y la prueba de funcionamiento. Para la prueba se va a rutear la salida hacia un led de la placa de prototipado del kit de grabado y se va a generar la entrada usando el ch7 del Rx comandado por el Tx de RC.
lunes, noviembre 13, 2006
Switch Manual - Auto
El circuito encargado de implementar el switch entre control manual y automático debe ser complemtamente confiable ya que es el que nos permite retomar el control manual en caso de detectar un mal funcionamiento del controlador automático que estamos desarrollando.
Por este motivo el circuito debe ser totalmente independiente del procesador que implementa el control autónomo y debe ser comandado directamente por un canal del receptor que recibe la señal del trasmisor RC en tierra.
Para hacer el cambio se utilizará el canal 7 (ON-OFF), cuando el selector del Tx correspondiente a este canal está en OFF la señal PWM tiene el pulso en uno durante 1 msec y cuando está en ON el pulso dura 2 ms. La señal PWM tiene un período de 20 msec (frec. 50 Hz).
El circuito encargado del implementar el switch debe discriminar entre estos pulsos y generar una señal (cero o uno lógico) que comande la pata select de un multiplexor que recibe las señales que comandan los servos desde el receptor Rx por un lado y desde el controlador autónomo por otro lado. Cuando el pulso de la señal PWM dura 1 ms (OFF) la pata select del MUX debe valer cero y por tanto los servos son comandados por el Tx, cuando el pulso dura 2 ms (ON) la pata select debe estar a uno y los servos son comandados por el Control Autónomo.
En primera instancia se diseñó un circuito analógico que en función del ancho del pulso generaba la señal para la pata select. Este circuito en esencia tenía comparador de la señal con un voltaje de referencia intermedio y luego un filtro que cargaba un condensador. En función de la duración del pulso se lograba un cero o un uno en la salida. Este circuito depende fuertemente de este voltaje de referencia, que depende del estado de las baterías.
Se hizo el layout, se mandó a hacer la placa a ENEKA y nosotros realizamos el montaje de los componentes. El impreso no estaba correctamente ruteado, por tanto hubo que corregirlo, y luego con el tiempo la oxidación de la placa produjo que algunas pista se cortocircuitaran haciendo que el circuito no funcionara en forma correcta. La confiabilidad no era suficientemente buena y se tomó la decisión de cambiar la implementación del circuito.
Actualmente el circuito se basa en un PIC 16F628 de Microchip. Un loop infinito muestrea la señal PWM que sale del canal 7 del Rx, cuando se detecta el flaco de subida se inicia un Timer y cuando se detecta el flaco de bajada se para el Timer. Luego se compara el tiempo registrado por el Timer con el valor correpondiente a 1.5 msec. Si el tiempo es menor de 1.5 msec la salida del pic es cero y si es mayor la salida es uno. Esta señal comanda la pata select del MUX.
El código fuente del programa que se graba en el pic se desarrollo en asembler. Gracias Danilo por colaborar en el desarrollo del programa y por su grabadora de PICs.
Ayer se hizo el programa y hoy 13 nov 2006 se va a realizar la prueba.
Por este motivo el circuito debe ser totalmente independiente del procesador que implementa el control autónomo y debe ser comandado directamente por un canal del receptor que recibe la señal del trasmisor RC en tierra.
Para hacer el cambio se utilizará el canal 7 (ON-OFF), cuando el selector del Tx correspondiente a este canal está en OFF la señal PWM tiene el pulso en uno durante 1 msec y cuando está en ON el pulso dura 2 ms. La señal PWM tiene un período de 20 msec (frec. 50 Hz).
El circuito encargado del implementar el switch debe discriminar entre estos pulsos y generar una señal (cero o uno lógico) que comande la pata select de un multiplexor que recibe las señales que comandan los servos desde el receptor Rx por un lado y desde el controlador autónomo por otro lado. Cuando el pulso de la señal PWM dura 1 ms (OFF) la pata select del MUX debe valer cero y por tanto los servos son comandados por el Tx, cuando el pulso dura 2 ms (ON) la pata select debe estar a uno y los servos son comandados por el Control Autónomo.
En primera instancia se diseñó un circuito analógico que en función del ancho del pulso generaba la señal para la pata select. Este circuito en esencia tenía comparador de la señal con un voltaje de referencia intermedio y luego un filtro que cargaba un condensador. En función de la duración del pulso se lograba un cero o un uno en la salida. Este circuito depende fuertemente de este voltaje de referencia, que depende del estado de las baterías.
Se hizo el layout, se mandó a hacer la placa a ENEKA y nosotros realizamos el montaje de los componentes. El impreso no estaba correctamente ruteado, por tanto hubo que corregirlo, y luego con el tiempo la oxidación de la placa produjo que algunas pista se cortocircuitaran haciendo que el circuito no funcionara en forma correcta. La confiabilidad no era suficientemente buena y se tomó la decisión de cambiar la implementación del circuito.
Actualmente el circuito se basa en un PIC 16F628 de Microchip. Un loop infinito muestrea la señal PWM que sale del canal 7 del Rx, cuando se detecta el flaco de subida se inicia un Timer y cuando se detecta el flaco de bajada se para el Timer. Luego se compara el tiempo registrado por el Timer con el valor correpondiente a 1.5 msec. Si el tiempo es menor de 1.5 msec la salida del pic es cero y si es mayor la salida es uno. Esta señal comanda la pata select del MUX.
El código fuente del programa que se graba en el pic se desarrollo en asembler. Gracias Danilo por colaborar en el desarrollo del programa y por su grabadora de PICs.
Ayer se hizo el programa y hoy 13 nov 2006 se va a realizar la prueba.
viernes, noviembre 10, 2006
Fin de semana 11 y 12 nov
El pronóstico del tiempo para este fin de semana nos va a permitir realizar nuevas pruebas de campo y tomar nuevas clases de vuelo.
Details for Saturday Nov, 11
Saturday Day
| Sunshine and patchy clouds | |||
| High | 22°C | ||
| RealFeel®: | 23°C | ||
| Winds: | ENE at 14km/h | ||
| Wind Gusts: | 40 km/h | ||
| Max UV Index: | Very High (8) | ||
| Amount of Precipitation: | 0.0mm | ||
| Amount of Rain: | 0.0mm | ||
| Amount of Snow: | 0.00cm | ||
| Hours of Precipitation: | 0 Hrs | ||
| Hours of Rain: | 0 Hrs | ||
| Hours of Daylight: | 13.5 Hrs |
jueves, noviembre 09, 2006
Fotos en el Taller
Durante la fabricación del avión pudimos disponer de las herramientas y máquinas existentes en el taller de la casa de Andrés Suttner. Algunas herramientas que nos resultaron especialmente útiles fueron el taladro de banco y el torno, que nos permitieron realizar distintas piezas sin tener que recurrir al tornero , lo cual significa tiempo y dinero.






Reunión confirmada
Se confirmó la reunión con nuestro tutor Ing. Rafael Canetti para mañana viernes 10 nov 2006 a las 16 hs en la casa de Andrés Suttner.
Además de conocer al avión, se le va a presentar el estado actual del proyecto y la planificación de las actividades que restan.
Además de conocer al avión, se le va a presentar el estado actual del proyecto y la planificación de las actividades que restan.
Más Fotos ...
Fotos de nuestra primer ida a la CTA
 La CTA dispone de dos pistas una de pasto, que es la más comunmente usada por los aviones de aeromodelismo, y otra de asfalto que es la que se aprecia en la foto. Esta pista tiene una longitud de 120 m y un ancho de unos 14 metros.
La CTA dispone de dos pistas una de pasto, que es la más comunmente usada por los aviones de aeromodelismo, y otra de asfalto que es la que se aprecia en la foto. Esta pista tiene una longitud de 120 m y un ancho de unos 14 metros.
En esta pista el avión sufrió una caída en el momento del despegue cuando se encontraba a unos 10 m de altura, impactando contra un alambrado que se encuentra a escasos metros del final de la pista, esto motivo nuestro traslado de puebas a la pista de la EMA.

 Momento en que se están acoplando las alas al fuselaje y conectando los distintos servos al receptor alojado en el interior del fuselaje.
Momento en que se están acoplando las alas al fuselaje y conectando los distintos servos al receptor alojado en el interior del fuselaje.
Las alas son extraibles lo cual facilita su trasnsporte en una camioneta, de lo contrario sería muy complejo ya que el avión tiene 3 m de envergadura (distancia entre los extremos de las alas) y dos metros de largo.

 En estas dos fotos se aprecia el avión y las dimensiones del mismo.
En estas dos fotos se aprecia el avión y las dimensiones del mismo.
En esta foto aparece la primera versión del carenado en dos partes, el caño de aliminio no tiene los agujeros de la última versión, está colocada la terminación aerodinámica de la cola, que luego fue quitada a fin de reducir peso.
 Foto del avión realizando pruebas de funcionamiento dinámico en pista.
Foto del avión realizando pruebas de funcionamiento dinámico en pista.
Se buscaron posibles defectos en el movimiento de los servos, en el comportamiento del tren de aterrizaja.
Luego de estas pruebas se modificó el tren delantero, se re ubicaron las posiciones de los trenes de aterrizaje, se redistribuyeron los pesos a fin de fijar el centro de masas en la posición correcta (a un tercio del borde de ataque del ala).
En estas pruebas el avión se limitó a carretear en pista y no se hicieron intentos de despegue.
Fotos sobre la pista de la EMA.
Fotos de la pista. La pista tiene una longitud total de 1100 m y un ancho de aproximadamente 32 m, lo cual lo torna un lugar muy seguro para las pruebas ya que disponemos de espacio para realizar las maniobras correspondientes en caso de sufrir imprevistos durante el des pegue o durante el vuelo.
pegue o durante el vuelo.
 El avión aparece sin el carenado que cubre el motor porque se estaban realizando ajustes en la carburación y en la posición del servo que comanda la rueda del tren delantero.
El avión aparece sin el carenado que cubre el motor porque se estaban realizando ajustes en la carburación y en la posición del servo que comanda la rueda del tren delantero.

El avión con carenado y listo para realizar la prueba de despegue.
En primera instancia se planificó carretear el avión en la pista, alcanzar la velocidad de despegue, levantarlo unos pocos centímetros del suelo y volver a bajarlo. Todo esto pensando en la integridad del avión.
Hay que tener presente que el despegue y el aterrizaje son los momentos más críticos del vuelo pues el avión no tiene demasiada sustentación, ni tampoco se dispone de espacio para realizar maniobras complejas.
 Bajo el fuerte sol, en la pista de la EMA, puede verse el nerviosismo previo al despegue en el rostro del equipo. Momentos antes tuvimos problemas con el control del acelerador, en dos oportunidades quedó trabado y no detectabamos la falla. Se corrigió el funcionamiento dinámico de la rueda del tren delantero junto con el timón de deriva (cola).
Bajo el fuerte sol, en la pista de la EMA, puede verse el nerviosismo previo al despegue en el rostro del equipo. Momentos antes tuvimos problemas con el control del acelerador, en dos oportunidades quedó trabado y no detectabamos la falla. Se corrigió el funcionamiento dinámico de la rueda del tren delantero junto con el timón de deriva (cola).
Esa pequeña figura que se aprecia en la foto es una imagen del Bobby en su primer vuelo. Foto tomada con la cámara del celular de Andrés Suttner.
 La CTA dispone de dos pistas una de pasto, que es la más comunmente usada por los aviones de aeromodelismo, y otra de asfalto que es la que se aprecia en la foto. Esta pista tiene una longitud de 120 m y un ancho de unos 14 metros.
La CTA dispone de dos pistas una de pasto, que es la más comunmente usada por los aviones de aeromodelismo, y otra de asfalto que es la que se aprecia en la foto. Esta pista tiene una longitud de 120 m y un ancho de unos 14 metros.En esta pista el avión sufrió una caída en el momento del despegue cuando se encontraba a unos 10 m de altura, impactando contra un alambrado que se encuentra a escasos metros del final de la pista, esto motivo nuestro traslado de puebas a la pista de la EMA.

 Momento en que se están acoplando las alas al fuselaje y conectando los distintos servos al receptor alojado en el interior del fuselaje.
Momento en que se están acoplando las alas al fuselaje y conectando los distintos servos al receptor alojado en el interior del fuselaje.Las alas son extraibles lo cual facilita su trasnsporte en una camioneta, de lo contrario sería muy complejo ya que el avión tiene 3 m de envergadura (distancia entre los extremos de las alas) y dos metros de largo.

 En estas dos fotos se aprecia el avión y las dimensiones del mismo.
En estas dos fotos se aprecia el avión y las dimensiones del mismo.En esta foto aparece la primera versión del carenado en dos partes, el caño de aliminio no tiene los agujeros de la última versión, está colocada la terminación aerodinámica de la cola, que luego fue quitada a fin de reducir peso.
 Foto del avión realizando pruebas de funcionamiento dinámico en pista.
Foto del avión realizando pruebas de funcionamiento dinámico en pista.Se buscaron posibles defectos en el movimiento de los servos, en el comportamiento del tren de aterrizaja.
Luego de estas pruebas se modificó el tren delantero, se re ubicaron las posiciones de los trenes de aterrizaje, se redistribuyeron los pesos a fin de fijar el centro de masas en la posición correcta (a un tercio del borde de ataque del ala).
En estas pruebas el avión se limitó a carretear en pista y no se hicieron intentos de despegue.
Fotos sobre la pista de la EMA.
Fotos de la pista. La pista tiene una longitud total de 1100 m y un ancho de aproximadamente 32 m, lo cual lo torna un lugar muy seguro para las pruebas ya que disponemos de espacio para realizar las maniobras correspondientes en caso de sufrir imprevistos durante el des
 pegue o durante el vuelo.
pegue o durante el vuelo. El avión aparece sin el carenado que cubre el motor porque se estaban realizando ajustes en la carburación y en la posición del servo que comanda la rueda del tren delantero.
El avión aparece sin el carenado que cubre el motor porque se estaban realizando ajustes en la carburación y en la posición del servo que comanda la rueda del tren delantero.
El avión con carenado y listo para realizar la prueba de despegue.
En primera instancia se planificó carretear el avión en la pista, alcanzar la velocidad de despegue, levantarlo unos pocos centímetros del suelo y volver a bajarlo. Todo esto pensando en la integridad del avión.
Hay que tener presente que el despegue y el aterrizaje son los momentos más críticos del vuelo pues el avión no tiene demasiada sustentación, ni tampoco se dispone de espacio para realizar maniobras complejas.
 Bajo el fuerte sol, en la pista de la EMA, puede verse el nerviosismo previo al despegue en el rostro del equipo. Momentos antes tuvimos problemas con el control del acelerador, en dos oportunidades quedó trabado y no detectabamos la falla. Se corrigió el funcionamiento dinámico de la rueda del tren delantero junto con el timón de deriva (cola).
Bajo el fuerte sol, en la pista de la EMA, puede verse el nerviosismo previo al despegue en el rostro del equipo. Momentos antes tuvimos problemas con el control del acelerador, en dos oportunidades quedó trabado y no detectabamos la falla. Se corrigió el funcionamiento dinámico de la rueda del tren delantero junto con el timón de deriva (cola).Esa pequeña figura que se aprecia en la foto es una imagen del Bobby en su primer vuelo. Foto tomada con la cámara del celular de Andrés Suttner.

GUMSTIX
GUMSTIX es la marca registrada de un computador de tarjeta basado en un procesador Intel XScale (200MHz y 400MHz). Están disponibles las versiones Connex y Basic.
Tiene 64 MB de RAM. Mide 80mm x 20mm x 6.3mm. Puede ser accedido usando un puerto serie, USB o Ethernet y/o interfaces inalámbricas.
La versión Connex permite extender su potencial y funcionalidades agregando otras tarjetas que se acoplan al Gumstix a traves de conectores para tal fin.
Tiene 64 MB de RAM. Mide 80mm x 20mm x 6.3mm. Puede ser accedido usando un puerto serie, USB o Ethernet y/o interfaces inalámbricas.
La versión Connex permite extender su potencial y funcionalidades agregando otras tarjetas que se acoplan al Gumstix a traves de conectores para tal fin.
En sus diferentes presentaciones, todas consumen menos de 250mA cuando están a máxima capacidad y menos de 50mA cuando están inactivas.
Gumstix ejecuta el sistema operativo Linux (embebido).
SOFTWARE 9 nov 2006
Con respecto al software podemos decir que está listo en un 65%, falta integrar las distintas partes del mismo que conforman el sistema de control.
Todo el código está hecho en lenguaje C, compilado sobre Linux ya que el mismo es el sistema operativo que trae instalado el Gumstix (procesador de 400 MHz). Mucho del código corresponde a funciones de bibliotecas de dominio público desarrolladas para proyectos de similares características, otras tantas corresponden a funciones desarrolladas para el procesador que estamos utilizando y algunas otras han sido desarrolladas por el equipo de proyecto, así como también se han realizado adaptaciones para ajustar las ya existentes a nuestros requerimientos.
A modo de ejemplo podemos decir que están listos los siguientes componentes:
Todo el código está hecho en lenguaje C, compilado sobre Linux ya que el mismo es el sistema operativo que trae instalado el Gumstix (procesador de 400 MHz). Mucho del código corresponde a funciones de bibliotecas de dominio público desarrolladas para proyectos de similares características, otras tantas corresponden a funciones desarrolladas para el procesador que estamos utilizando y algunas otras han sido desarrolladas por el equipo de proyecto, así como también se han realizado adaptaciones para ajustar las ya existentes a nuestros requerimientos.
A modo de ejemplo podemos decir que están listos los siguientes componentes:
- Path Planning
- Conversor analógico - digital
- Generador de PWM
- Lectura de GPS
- Lectura de Acelerómetros
- Lectura de Giróscopos
- Logueo de datos en archivo de texto plano de los valores sensados
- Filtro de Kalman (matriz de dimensiones 9x9)
- Control PID
- Conversión de coordenadas geodésicas a cartesianas 3D
- Bibliotecas para el Gumstix.
- Comunicación entre el procesador gumstix y el robostix
Qúe es lo que está faltando?
- Aplicación principal que implementa el sistema de control, el cual utiliza e integra las funciones detalladas más arriba.
- Interfaces que realizan la adaptación de datos entre las distintos componentes del software.
- Ajuste de parámetros que se correspondan con los requeridos por nuestro avión.
- Pruebas del sistema total.
martes, noviembre 07, 2006
Lugares de trabajo y Pistas de Vuelo
En el mapa se aprecian los lugares que de trabajo q ue disponemos.
ue disponemos.
En principio el lugar de reunión más frecuentado fue la casa de Rodrigo, que hemos denominado "Centro de Desarrollo". Ahí se llevaron acabo las primeras actividades del proyecto, como ser la búsqueda de información referente al estado del arte, las decisiones de diseño y las primeras etapas de la construcción del avión. Actualmente es el lugar donde se ha llevado acabo la construcción de gran parte del software que implementa el control autónomo, así como también la integración del hardware compuesto por el procesador, los sensores y el GPS.
Luego nos trasladamos a la casa de Andrés (Suttner) donde se llevó acabo el grueso de la construcción del Bobby. Hemos denominado a este lugar "Base de Operaciones" dado que es el lugar donde tenemos el avión, es aquí donde se planifican las distintas pruebas a realizar y desde donde partimos hacia las pistas de vuelo.
Los dos lugares que disponemos para volar son la CTA y la EMA.
La CTA (Centro Técnico de Aeromodelismo) se encuentra en las afueras de Montevideo(Canelones), a unos 22 kms de nuestra Base de Operaciones. La CTA es propiedad de los socios de un club de aeromodelismo, que generosamente nos abrieron sus puertas de manera totalmente disinteresada y nos permiten utilizar sus pistas para realizar las pruebas. Queremos agradecer oficialmente a todos los miembros de la CTA por sus consejos y aportes y por la manera en que siempre nos han tratado.
La EMA (Escuela Militar de Aeronáutica) está ubicada fuera de Montevideo a unos 23 kms de nuestra Base de Operaciones. Esta pista nos ha permitido realizar prubas con mayor seguridad , debido a que la pista posee mayores dimensiones que la que dispone la CTA . Para tener acceso a esta pista hemos tenido que solicitar de manera oficial que nos permitieran el acceso para realizar las pruebas.
 ue disponemos.
ue disponemos.En principio el lugar de reunión más frecuentado fue la casa de Rodrigo, que hemos denominado "Centro de Desarrollo". Ahí se llevaron acabo las primeras actividades del proyecto, como ser la búsqueda de información referente al estado del arte, las decisiones de diseño y las primeras etapas de la construcción del avión. Actualmente es el lugar donde se ha llevado acabo la construcción de gran parte del software que implementa el control autónomo, así como también la integración del hardware compuesto por el procesador, los sensores y el GPS.
Luego nos trasladamos a la casa de Andrés (Suttner) donde se llevó acabo el grueso de la construcción del Bobby. Hemos denominado a este lugar "Base de Operaciones" dado que es el lugar donde tenemos el avión, es aquí donde se planifican las distintas pruebas a realizar y desde donde partimos hacia las pistas de vuelo.
Los dos lugares que disponemos para volar son la CTA y la EMA.
La CTA (Centro Técnico de Aeromodelismo) se encuentra en las afueras de Montevideo(Canelones), a unos 22 kms de nuestra Base de Operaciones. La CTA es propiedad de los socios de un club de aeromodelismo, que generosamente nos abrieron sus puertas de manera totalmente disinteresada y nos permiten utilizar sus pistas para realizar las pruebas. Queremos agradecer oficialmente a todos los miembros de la CTA por sus consejos y aportes y por la manera en que siempre nos han tratado.
La EMA (Escuela Militar de Aeronáutica) está ubicada fuera de Montevideo a unos 23 kms de nuestra Base de Operaciones. Esta pista nos ha permitido realizar prubas con mayor seguridad , debido a que la pista posee mayores dimensiones que la que dispone la CTA . Para tener acceso a esta pista hemos tenido que solicitar de manera oficial que nos permitieran el acceso para realizar las pruebas.
Primeras fotos del bobby
 Con el proposito de tener ideas de dimensiones del avion, usamos un poco de carton y foam de embalaje para tener una idea de hacia donde ibamos con la construccion de las partes. Esto nos sirvio para rapidamente darnos cuenta de si las proporciones previamente discutidas se iban cumpliendo.
Con el proposito de tener ideas de dimensiones del avion, usamos un poco de carton y foam de embalaje para tener una idea de hacia donde ibamos con la construccion de las partes. Esto nos sirvio para rapidamente darnos cuenta de si las proporciones previamente discutidas se iban cumpliendo. A modo de seguir visualizando y fijar ideas sobre dimensiones finales, tomamos esta fotografia con Andres. Al fondo se ve el otro Andres (chappe) y la Keyna que fue un integrante mas durante esa etapa en casa :-)
A modo de seguir visualizando y fijar ideas sobre dimensiones finales, tomamos esta fotografia con Andres. Al fondo se ve el otro Andres (chappe) y la Keyna que fue un integrante mas durante esa etapa en casa :-)La estructura de forma triangular que se ve a la derecha es la bancada de prueba del motor.
 En esta foto se ve las piezas principales del fuselaje: nariz, cuerpo principal y terminacion de la cola (por ahora no usada por su peso)
En esta foto se ve las piezas principales del fuselaje: nariz, cuerpo principal y terminacion de la cola (por ahora no usada por su peso)En las 2 fotos finales el bobby va tomando forma finalemente :D


Reunión con Canetti
Enviamos un mail a nuestro tutor para coordinar una reunión para contarle de las últimas novedades del proyecto y mostrarle lo que tenemos hecho hasta el momento, lo que falta, los pasos a seguir y una estimación de la fecha final del proyecto.
Estamos a la espera de su contestación. En estos momentos estamos documentando parte de lo que tenemos hasta el momento.
Estamos a la espera de su contestación. En estos momentos estamos documentando parte de lo que tenemos hasta el momento.
lunes, noviembre 06, 2006
Fotos del Bobby
 Lunes 6-nov-2006
Lunes 6-nov-2006Le sacamos unas fotos al Bobby para tener un registro antes de su terminación. Aún restan algunos detalles, la terminación, pintarlo y colocarle los logos del proyecto. Aunque la iluminación no es la mejor, se intentó mostrar el aspecto general que presenta el avión y algunos detalles del mismo.

Detalle de los movimientos del elevador y del timón de cola (rudder). Los servos se montaron dentro de la cavidad de la cola.
 Servo que mueve la rueda del tren de aterrizaje delantero. Este servo se mueve en forma coordinada con el servo de la cola, pero no ocupan el mismo canal. Inicialmente compartían el mismo canal, el comportamiento estático era bueno, pero el dinámico muy malo, por tanto se modifico. Los cilindros blancos que se aprecian son los soportes del motor.
Servo que mueve la rueda del tren de aterrizaje delantero. Este servo se mueve en forma coordinada con el servo de la cola, pero no ocupan el mismo canal. Inicialmente compartían el mismo canal, el comportamiento estático era bueno, pero el dinámico muy malo, por tanto se modifico. Los cilindros blancos que se aprecian son los soportes del motor. Vista interior del fuselaje. Compartimento trasero destinado al receptor y al controlador, incluyendo sensores y baterías de alimentación. Los cables que aparecen en la imagen corresponden a los conectores de los servos de los alerones, el elevador y el rudder. También se puede apreciar en la parte superior izquierda la llave de corte de las baterías que alimentan los servos y el receptor. Tambien se aprecia uno de los tensores de aluminio que dan mayor rigidez al tren de aterrizaje trasero.
Vista interior del fuselaje. Compartimento trasero destinado al receptor y al controlador, incluyendo sensores y baterías de alimentación. Los cables que aparecen en la imagen corresponden a los conectores de los servos de los alerones, el elevador y el rudder. También se puede apreciar en la parte superior izquierda la llave de corte de las baterías que alimentan los servos y el receptor. Tambien se aprecia uno de los tensores de aluminio que dan mayor rigidez al tren de aterrizaje trasero. En esta foto se aprecia el servo que comanda el acelerador del carburador. El avión cuenta con un motor 38 cc de dos tiempos, que funciona con una mezcla de nafta y aceite con una relación de 20 a 1.
En esta foto se aprecia el servo que comanda el acelerador del carburador. El avión cuenta con un motor 38 cc de dos tiempos, que funciona con una mezcla de nafta y aceite con una relación de 20 a 1. Vista inferior. Se ve como el carenado permite el fácil acceso a la bujía del motor. Inicialmente el carenado era de una sola pieza y totalmente cerrado, por tanto para retirarlo había que sacar la hélice, lo cual era muy trabajoso. Hay que tener presente que cada vez que el avión va a pista es necesario realizar un ajuste en la carburación, pues es muy sensible a los cambios de temperatura y demás condiciones del climáticas. Luego se modificó, haciendo que la pieza fuese en dos partes, pero resultaba compleja su colocación, además encontramos que los tornillos que unian las piezas se aflojaban con la vibración del motor. En la foto se observa la última versión. El carenado se sujeta al fuselaje con 5 tornillos, las tuercas están fijas en el interior para hacer más sencillo el montaje. El carenado se coloca desde la parte superior, no teniendo que tocar ninguna pieza del motor.
Vista inferior. Se ve como el carenado permite el fácil acceso a la bujía del motor. Inicialmente el carenado era de una sola pieza y totalmente cerrado, por tanto para retirarlo había que sacar la hélice, lo cual era muy trabajoso. Hay que tener presente que cada vez que el avión va a pista es necesario realizar un ajuste en la carburación, pues es muy sensible a los cambios de temperatura y demás condiciones del climáticas. Luego se modificó, haciendo que la pieza fuese en dos partes, pero resultaba compleja su colocación, además encontramos que los tornillos que unian las piezas se aflojaban con la vibración del motor. En la foto se observa la última versión. El carenado se sujeta al fuselaje con 5 tornillos, las tuercas están fijas en el interior para hacer más sencillo el montaje. El carenado se coloca desde la parte superior, no teniendo que tocar ninguna pieza del motor. Tren de aterrizaje delantero. Fue modificado de su verión de fábica, porque era muy largo y se doblaba demasiado con los desniveles de la pista, principalmente en pista de pasto , y hacía que el avión bajara la nariz y la hélice impactaba contra el piso, con la consecuente rotura. Ahora estamos muy conformes con su funcionamiento, el avión es muy estable con este nuevo formato más corto en su parte flexible.
Tren de aterrizaje delantero. Fue modificado de su verión de fábica, porque era muy largo y se doblaba demasiado con los desniveles de la pista, principalmente en pista de pasto , y hacía que el avión bajara la nariz y la hélice impactaba contra el piso, con la consecuente rotura. Ahora estamos muy conformes con su funcionamiento, el avión es muy estable con este nuevo formato más corto en su parte flexible. Compuertas de acceso al interior del fuselaje. La puerta delantera da acceso al tanque de combustibe de 500 cc y la trasera al control y demás hardware montado en el avión.
Compuertas de acceso al interior del fuselaje. La puerta delantera da acceso al tanque de combustibe de 500 cc y la trasera al control y demás hardware montado en el avión. Perfil del ala y alerón. El perfil de ala fue una de las cosas más discutidas en las primeras etapas del proyecto cuando estabamos diseñando el avión. Terminamos adoptando un perfil Epler 214 que es autoestable, que se ajustaba a nuestros requerimientos. Los alerones son accionados por servos de alto torque montados uno en cada ala a unso pocos centímetros de la bisagra del alerón.
Perfil del ala y alerón. El perfil de ala fue una de las cosas más discutidas en las primeras etapas del proyecto cuando estabamos diseñando el avión. Terminamos adoptando un perfil Epler 214 que es autoestable, que se ajustaba a nuestros requerimientos. Los alerones son accionados por servos de alto torque montados uno en cada ala a unso pocos centímetros de la bisagra del alerón. En esta foto se aprecia levemente el diedro que presentas las alas, lo cual torna al avión de gran estabilidad lateral. En todo momento lo que se buscó fue construir un modelo estable tanto longitudinalmente, como lateralmente, que permitiera al avión realizar maniobras seguras y facilitando luego la tarea del controlador. Hay que tener presente que este modelo está pensado para aplicaciones como ser reconocimiento y fotografía aerea, las cuales requieren un vuelo estable-
En esta foto se aprecia levemente el diedro que presentas las alas, lo cual torna al avión de gran estabilidad lateral. En todo momento lo que se buscó fue construir un modelo estable tanto longitudinalmente, como lateralmente, que permitiera al avión realizar maniobras seguras y facilitando luego la tarea del controlador. Hay que tener presente que este modelo está pensado para aplicaciones como ser reconocimiento y fotografía aerea, las cuales requieren un vuelo estable-Domingo LLuvioso
Lunes 6-nov-2006
El domingo como estaba previsto llovió a partir del medio día y durante toda la tarde, por tanto no pudimos ir a realizar pruebas con el avión.
Nos dedicamos al software. Rodrigo está investigando la mejor implementación para un contralador PID. Por su parte Andrés Suttner se dedicó a terminar el código en C, contrastando los resultados con la implemetación en Matlab
El domingo como estaba previsto llovió a partir del medio día y durante toda la tarde, por tanto no pudimos ir a realizar pruebas con el avión.
Nos dedicamos al software. Rodrigo está investigando la mejor implementación para un contralador PID. Por su parte Andrés Suttner se dedicó a terminar el código en C, contrastando los resultados con la implemetación en Matlab
domingo, noviembre 05, 2006
agradecimiento para "la larva"

Queremos agradecer de manera oficial a "La Larva" por sus infinitos aportes y su continua colaboración con el equipo de proyecto
Primer Clase de Vuelo - CTA
 Sabado 4-nov-2006
Sabado 4-nov-2006Debido a la cumbre de presidentes que se lleva a cabo en estos momentos, por razones de seguridad, no poodemos acceder a la
pista de la EMA.
 Decidimos ir a la pista de la CTA a recibir nuestra primer clase de vuelo. Para ello utilizamos un aeromodelo conocido como Sky Leader, que se puso en orden de vuelo con el fin de recibir nuestra instrucción. Este modelo es una avión con un motor 0.46 plg^3, de ala baja, con grandes prestaciones que lo tornan un avión de gran maniobrabilidad en vuelo. En principio este avión no resulta adecuado para un principiante dado que no es una avión tipo Trainer y por tanto no es muy estable.
Decidimos ir a la pista de la CTA a recibir nuestra primer clase de vuelo. Para ello utilizamos un aeromodelo conocido como Sky Leader, que se puso en orden de vuelo con el fin de recibir nuestra instrucción. Este modelo es una avión con un motor 0.46 plg^3, de ala baja, con grandes prestaciones que lo tornan un avión de gran maniobrabilidad en vuelo. En principio este avión no resulta adecuado para un principiante dado que no es una avión tipo Trainer y por tanto no es muy estable.

Debido a que solo disponíamos de un solo trasmisor, nuestro instructor nos hizo realizar maniobras en pista a modo de ir automatizando el sistema "ojos - comandos" y para familiarizarnos con los comandos del trasmisor y la sensibilidad de los controles.
Luego de un rato el equipo fue adquiriendo mejor manejo y gracias a que un socio de la CTA nos prestó su radio y un cable trainer, que permite interconectar 2 trasmisores, uno como "master" para el instructor y otro como "esclavo" para el aprendiz. Esto permite recibir las instrucciones de vuelo de manera segura no poniendo en peligro la integridad del modelo. De esta forma recibimos nuestra primer clase de vuelo realizando maniobras básicas.
equipo fue adquiriendo mejor manejo y gracias a que un socio de la CTA nos prestó su radio y un cable trainer, que permite interconectar 2 trasmisores, uno como "master" para el instructor y otro como "esclavo" para el aprendiz. Esto permite recibir las instrucciones de vuelo de manera segura no poniendo en peligro la integridad del modelo. De esta forma recibimos nuestra primer clase de vuelo realizando maniobras básicas.
Gracias Alcides.
Al final del día tuvimos una reunión para ultimar detalles de los próximos pasos a seguir.
a seguir.
pista de la EMA.
 Decidimos ir a la pista de la CTA a recibir nuestra primer clase de vuelo. Para ello utilizamos un aeromodelo conocido como Sky Leader, que se puso en orden de vuelo con el fin de recibir nuestra instrucción. Este modelo es una avión con un motor 0.46 plg^3, de ala baja, con grandes prestaciones que lo tornan un avión de gran maniobrabilidad en vuelo. En principio este avión no resulta adecuado para un principiante dado que no es una avión tipo Trainer y por tanto no es muy estable.
Decidimos ir a la pista de la CTA a recibir nuestra primer clase de vuelo. Para ello utilizamos un aeromodelo conocido como Sky Leader, que se puso en orden de vuelo con el fin de recibir nuestra instrucción. Este modelo es una avión con un motor 0.46 plg^3, de ala baja, con grandes prestaciones que lo tornan un avión de gran maniobrabilidad en vuelo. En principio este avión no resulta adecuado para un principiante dado que no es una avión tipo Trainer y por tanto no es muy estable.
Debido a que solo disponíamos de un solo trasmisor, nuestro instructor nos hizo realizar maniobras en pista a modo de ir automatizando el sistema "ojos - comandos" y para familiarizarnos con los comandos del trasmisor y la sensibilidad de los controles.
Luego de un rato el
 equipo fue adquiriendo mejor manejo y gracias a que un socio de la CTA nos prestó su radio y un cable trainer, que permite interconectar 2 trasmisores, uno como "master" para el instructor y otro como "esclavo" para el aprendiz. Esto permite recibir las instrucciones de vuelo de manera segura no poniendo en peligro la integridad del modelo. De esta forma recibimos nuestra primer clase de vuelo realizando maniobras básicas.
equipo fue adquiriendo mejor manejo y gracias a que un socio de la CTA nos prestó su radio y un cable trainer, que permite interconectar 2 trasmisores, uno como "master" para el instructor y otro como "esclavo" para el aprendiz. Esto permite recibir las instrucciones de vuelo de manera segura no poniendo en peligro la integridad del modelo. De esta forma recibimos nuestra primer clase de vuelo realizando maniobras básicas.Gracias Alcides.
Al final del día tuvimos una reunión para ultimar detalles de los próximos pasos
 a seguir.
a seguir.
Suscribirse a:
Comentarios (Atom)

{kind=link}